Contextual Affordances for Action-Effect Prediction in a Robotic-Cleaning Task
IEEE/RSJ International Conference on Intelligent Robots and Systems, Workshop Learning Object Affordances: A Fundamental Step to Allow Prediction, Planning and Tool Use?,
- Oct 2015
Associated documents :

Affordances are a useful method to anticipate the effect of an action performed by an agent.
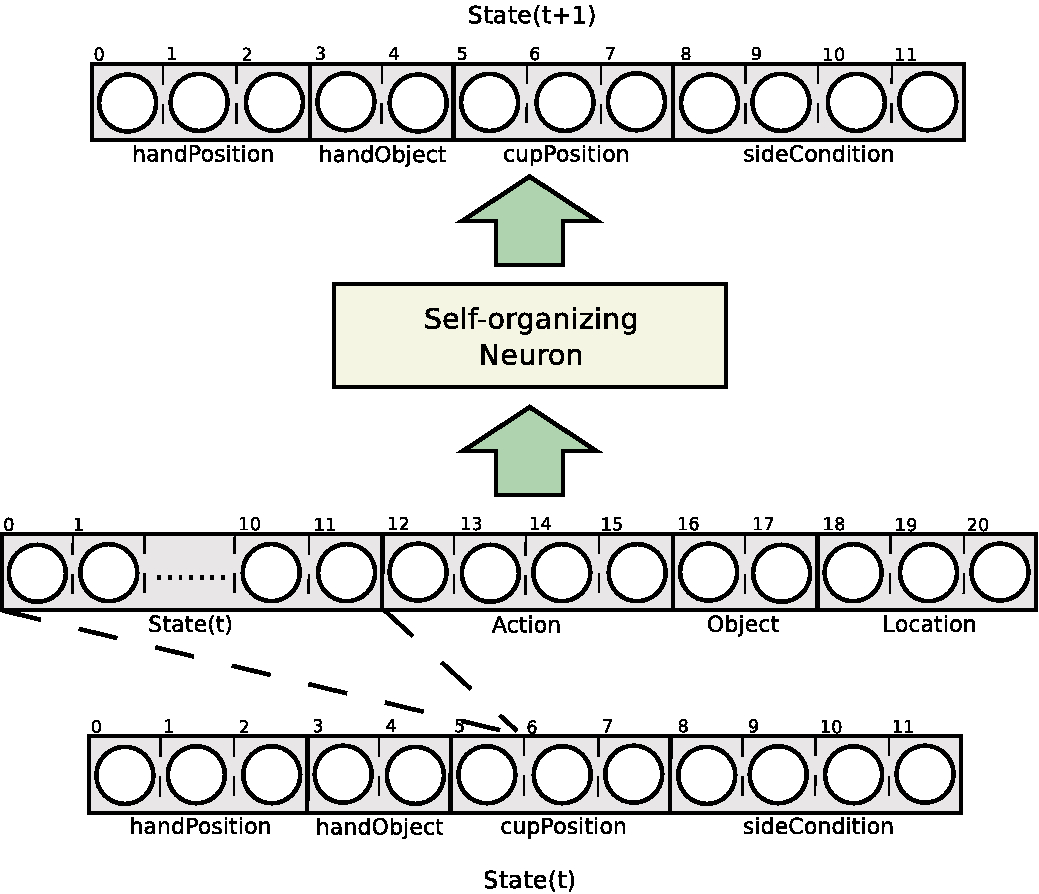
In this work, we present a robotic-cleaning task using contextual affordances implemented through a self-organizing neural network to predict the effect of the performed actions and avoid failed states.
Current results on a simulated robot environment show that our architecture is able to predict future states with high accuracy.
@InProceedings{CPW15,
author = {Cruz, Francisco and Parisi, German I. and Wermter, Stefan},
title = {Contextual Affordances for Action-Effect Prediction in a Robotic-Cleaning Task},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems, Workshop Learning Object Affordances: A Fundamental Step to Allow Prediction, Planning and Tool Use?},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {}
year = {2015},
month = {Oct},
publisher = {None},
doi = {}
url = {None},
}