Improving Reinforcement Learning with Interactive Feedback and Affordances
IEEE International Conference on Development and Learning and on Epigenetic Robotics (ICDL-EpiRob),
pages 125--130,
doi: 10.1109/DEVLRN.2014.6982975
- Oct 2014
Associated documents :


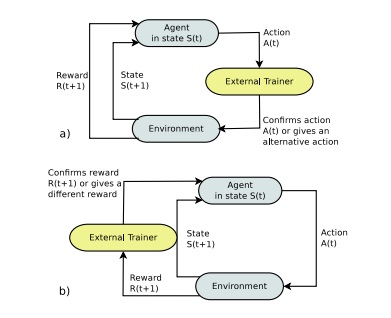
Interactive reinforcement learning constitutes an alternative for improving convergence speed in reinforcement learning methods.
In this work, we investigate inter-agent training and present an approach for knowledge transfer in a domestic scenario where a first agent is trained by reinforcement learning and afterwards transfers selected knowledge to a second agent by instructions to achieve more efficient training.
We combine this approach with action-space pruning by using knowledge on affordances and show that it significantly improves convergence speed in both classic and interactive reinforcement learning scenarios.




@InProceedings{CMWW14,
author = {Cruz, Francisco and Magg, Sven and Weber, Cornelius and Wermter, Stefan},
title = {Improving Reinforcement Learning with Interactive Feedback and Affordances},
booktitle = {IEEE International Conference on Development and Learning and on Epigenetic Robotics (ICDL-EpiRob)},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {125--130},
year = {2014},
month = {Oct},
publisher = {IEEE},
doi = {10.1109/DEVLRN.2014.6982975},
url = {None},
}