Appearance-based localization for mobile robots using digital zoom and visual compass
Robotics and Autonomous Systems,
Volume 56,
Number 2,
pages 143--156,
- Feb 2008
Associated documents :

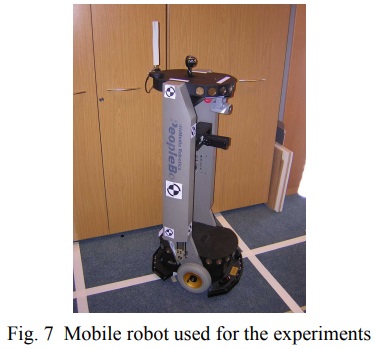
This paper describes a localization system for mobile robots moving in dynamic indoor
environments, which uses probabilistic integration of visual appearance and odometry
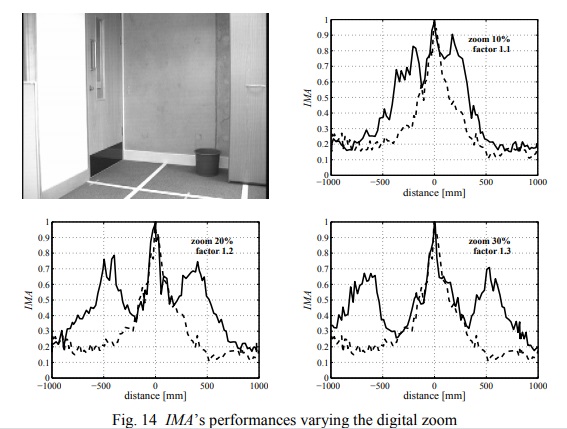
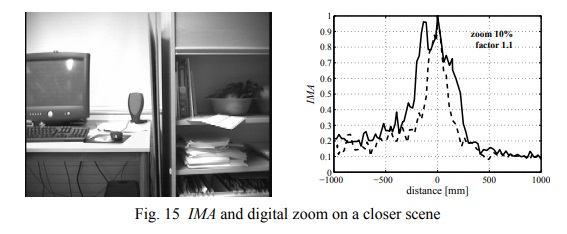
information. The approach is based on a novel image matching algorithm for appearancebased place recognition that integrates digital zooming, to extend the area of application, and
a visual compass. Ambiguous information used for recognizing places is resolved with
multiple hypothesis tracking and a selection procedure inspired by Markov localization. This
enables the system to deal with perceptual aliasing or absence of reliable sensor data. It has
been implemented on a robot operating in an office scenario and the robustness of the
approach demonstrated experimentally.

@Article{BBFW08,
author = {Bellotto, N. and Burn, Kevin and Fletcher, E. and Wermter, Stefan},
title = {Appearance-based localization for mobile robots using digital zoom and visual compass},
booktitle = {None},
journal = {Robotics and Autonomous Systems},
editors = {None},
number = {2},
volume = {56},
pages = {143--156},
year = {2008},
month = {Feb},
publisher = {Elsevier},
doi = {}
url = {None},
}