Developing Concepts from Robot Behaviour by Growing Self Organizing Networks
7th International Conference on Epigenetic Robotics,
- 2007
Associated documents :

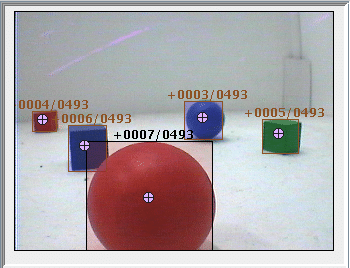
This paper describes an approach to developing concepts from robot actions using dynamically growing self-organising networks. A robot
explores the difference between objects with different properties, e.g. rollable and pushable
shapes. We use an assimilation mechanism to
build robot analogs of Piagets first sensory-motor
circular reactions. Motor schemes are accumulated in a growing self organizing network according to the Interactivist grounding hypothesis.
The structures which form are similar to (very
primitive) Kellyan personal constructs and provide potential distinctions for the accommodation
process. The purpose is to demonstrate emergence of these internal structures which indicate
separable clusters of experience. In this way
we show how grounded, pre-linguistic concepts
might develop from a robots interaction with its
environment.
@InProceedings{WWP07,
author = {Willmot, Christopher and Wermter, Stefan and Panchev, Christo},
title = {Developing Concepts from Robot Behaviour by Growing Self Organizing Networks},
booktitle = {7th International Conference on Epigenetic Robotics},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {}
year = {2007},
month = {}
publisher = {IEEE},
doi = {}
url = {None},
}