Reinforcement Learning for Platform-Independent Visual Robot Control
International Joint Conference on Neural Networks,
pages 2459--2466,
doi: 10.1109/IJCNN.2006.247094
- Jan 2006
Associated documents :


This paper proposes a new architecture for robot
control. A test scenario is outlined to test the proposed system
and enable a comparison with an existing system, which is able
to fulfil the scenario and thus be used as a benchmark. The
scenario is a navigation task, to allow a robot to approach a
specified landmark. The proposed architecture will make use of
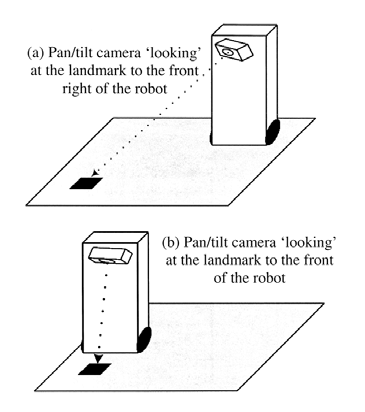
two control units, one to allow a pan/tilt camera to track the
landmark as the robot moves, and a second to control the
robots drive motors. These units will be trained via
reinforcement learning, and provide the potential for platformindependent robot control.


@InProceedings{MBW06,
author = {Muse, David and Burn, Kevin and Wermter, Stefan},
title = {Reinforcement Learning for Platform-Independent Visual Robot Control},
booktitle = {International Joint Conference on Neural Networks},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {2459--2466},
year = {2006},
month = {Jan},
publisher = {IEEE},
doi = {10.1109/IJCNN.2006.247094},
url = {None},
}