A Camera-Direction Dependent Visual-Motor Coordinate Transformation for a Visually Guided Neural Robot
Knowledge-Based Systems,
Volume 19,
Number 5,
pages 348--355,
doi: 10.1016/j.knosys.2005.11.020
- Sep 2006
Associated documents :


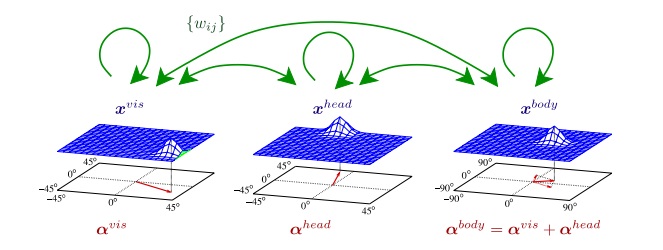
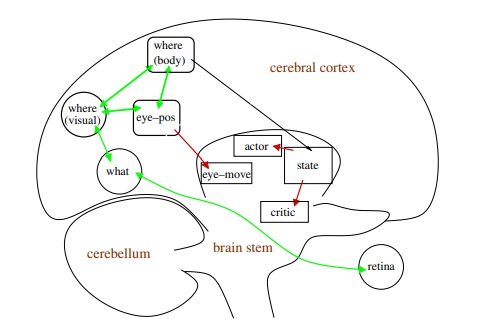
Objects of interest are represented in the brain simultaneously in different frames of reference. Knowing the positions of ones head
and eyes, for example, one can compute the body-centred position of an object from its perceived coordinates on the retinae. We propose
a simple and fully trained attractor network which computes head-centred coordinates given eye position and a perceived retinal object
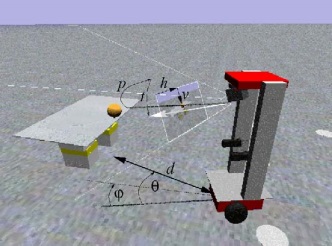
position. We demonstrate this system on artificial data and then apply it within a fully neurally implemented control system which visually guides a simulated robot to a table for grasping an object. The integrated system has as input a primitive visual system with a what
where pathway which localises the target object in the visual field. The coordinate transform network considers the visually perceived
object position and the camera pan-tilt angle and computes the target position in a body-centred frame of reference. This position is
used by a reinforcement-trained network to dock a simulated PeopleBot robot at a table for reaching the object. Hence, neurally computing coordinate transformations by an attractor network has biological relevance and technical use for this important class of
computations.
@Article{WMEW06,
author = {Weber, Cornelius and Muse, David and Elshaw, Mark I. and Wermter, Stefan},
title = {A Camera-Direction Dependent Visual-Motor Coordinate Transformation for a Visually Guided Neural Robot},
booktitle = {None},
journal = {Knowledge-Based Systems},
editors = {None},
number = {5},
volume = {19},
pages = {348--355},
year = {2006},
month = {Sep},
publisher = {Elsevier},
doi = {10.1016/j.knosys.2005.11.020},
url = {None},
}