Spatio-Temporal Neural Data Mining Architecture in Learning Robots
International Joint Conference in Neural Networks,
pages 2802--2807,
doi: 10.1109/IJCNN.2005.1556369
- Jan 2005
Associated documents :


There has been little research into the use of
hybrid neural data mining to improve robot performance or
enhance their capability. This paper presents a novel neural
data mining technique that analyses robot sensor data for
imitation learning. Learning by imitation allows a robot to
learn from observing either another robot or a human to gain
skills, understand the behaviour of others and create solutions
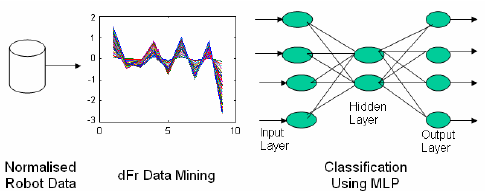
to problems. We demonstrate a hybrid approach of
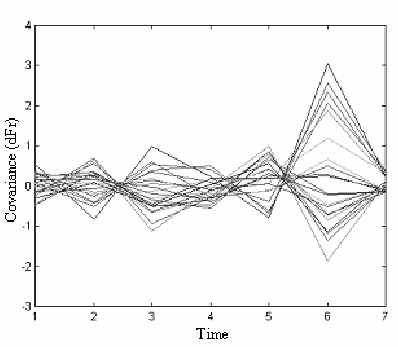
differential ratio data mining to perform analysis on spatiotemporal robot behavioural data. The technique offers
classification performance gains for recognition of robot
actions by highlighting points of covariance and hence interest
within the data.

@InProceedings{MEMBW05,
author = {Malone, James and Elshaw, Mark I. and McGarry, Ken and Bowerman, Chris and Wermter, Stefan},
title = {Spatio-Temporal Neural Data Mining Architecture in Learning Robots},
booktitle = {International Joint Conference in Neural Networks},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {2802--2807},
year = {2005},
month = {Jan},
publisher = {IEEE},
doi = {10.1109/IJCNN.2005.1556369},
url = {None},
}