Robotic Sound-Source Localization and Tracking using Interaural Time Difference and Cross-Correlation
Proceedings of NeuroBotics Workshop,
Editors: Guenter Palm and Stefan Wermter,
pages 89--97,
- Sep 2004
Associated documents :

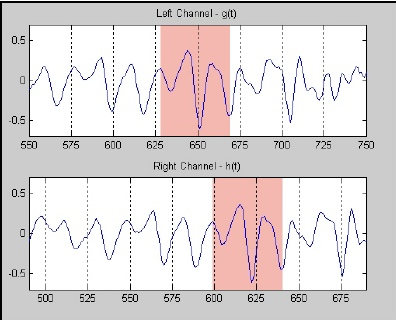
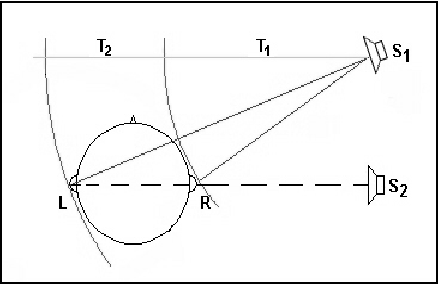
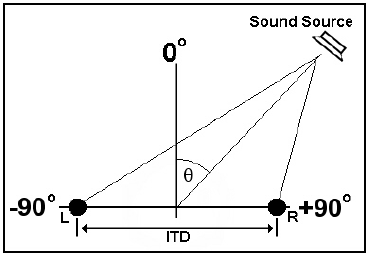
Interaural Time Difference (ITD) is used in the
mammalian auditory system to compute the angle of
incidence of an acoustic sound-source on the horizontal plane.
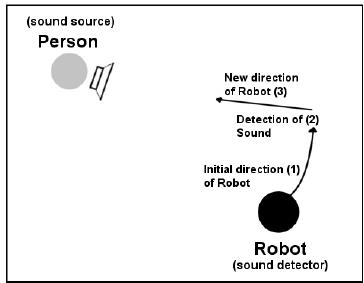
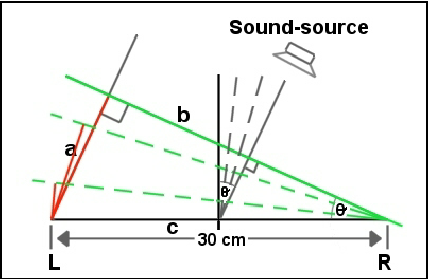
This paper describes how ITD can be incorporated into a
robotic acoustic tracking system to enable the robot to locate
and orient towards sound-sources within its environment.
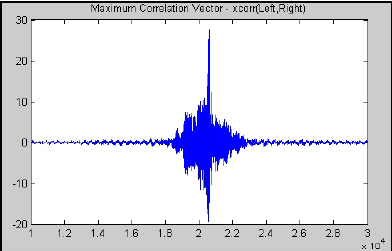
We describe a system compiled using cross-correlation and
auditory cues that has a lot of potential for robot soundsource localization.

@InProceedings{MEW04,
author = {Murray, John C. and Erwin, Harry and Wermter, Stefan},
title = {Robotic Sound-Source Localization and Tracking using Interaural Time Difference and Cross-Correlation},
booktitle = {Proceedings of NeuroBotics Workshop},
journal = {None},
editors = {Guenter Palm and Stefan Wermter},
number = {}
volume = {}
pages = {89--97},
year = {2004},
month = {Sep},
publisher = {}
doi = {}
url = {}
}