Robot Docking with Neural Vision and Reinforcement
Knowledge-Based Systems,
Volume 12,
Number 2--4,
pages 165--72,
doi: 10.1016/j.knosys.2004.03.012
- May 2004
Associated documents :


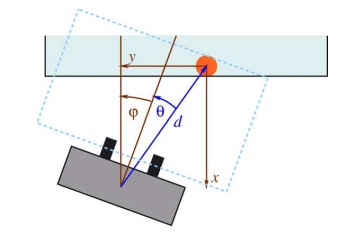
We present a solution for robotic docking, i.e. approach of a robot toward a table so that it can grasp an object. One constraint is that our
PeopleBot robot has a short non-extendable gripper and wide shoulders. Therefore, it must approach the table at a perpendicular angle so
that the gripper can reach over it. Another constraint is the use of vision to locate the object. Only the angle is supplied as additional input. We
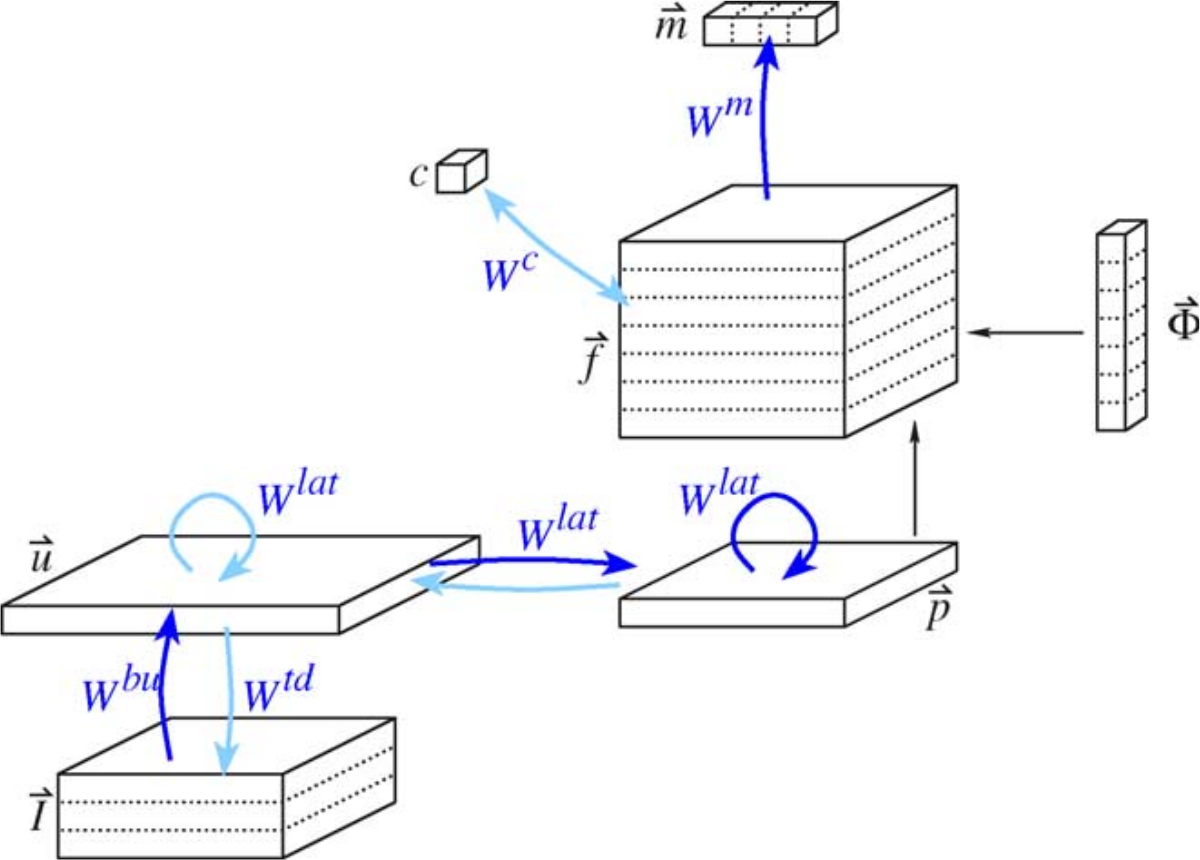
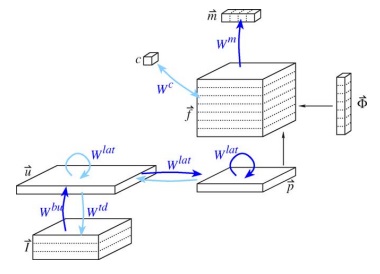
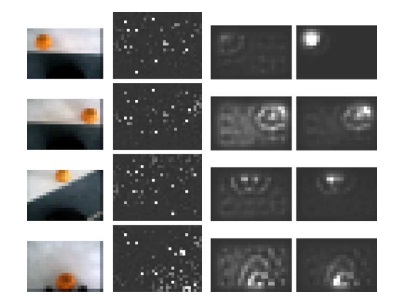
present a solution based solely on neural networks: object recognition and localisation is trained, motivated by insights from the lower visual
system. Based on the hereby obtained perceived location, we train a value function unit and four motor units via reinforcement learning.
After training the robot can approach the table at the correct position and in a perpendicular angle. This is to be used as part of a bigger system
where the robot acts according to verbal instructions based on multi-modal neuronal representations as found in language and motor cortex
(mirror neurons).




@Article{WWZ04,
author = {Weber, Cornelius and Wermter, Stefan and Zochios, Alex},
title = {Robot Docking with Neural Vision and Reinforcement},
booktitle = {None},
journal = {Knowledge-Based Systems},
editors = {None},
number = {2--4},
volume = {12},
pages = {165--72},
year = {2004},
month = {May},
publisher = {Elsevier},
doi = {10.1016/j.knosys.2004.03.012},
url = {None},
}