An Associator Network Approach to Robot Learning by Imitation through Vision, Motor Control and Language
Proceedings of the International Joint Conference on Neural Networks,
pages 591--596,
- Jul 2004
Associated documents :

Imitation learning offers a valuable approach for
developing intelligent robot behaviour. We present an imitation
approach based on an associator neural network inspired by
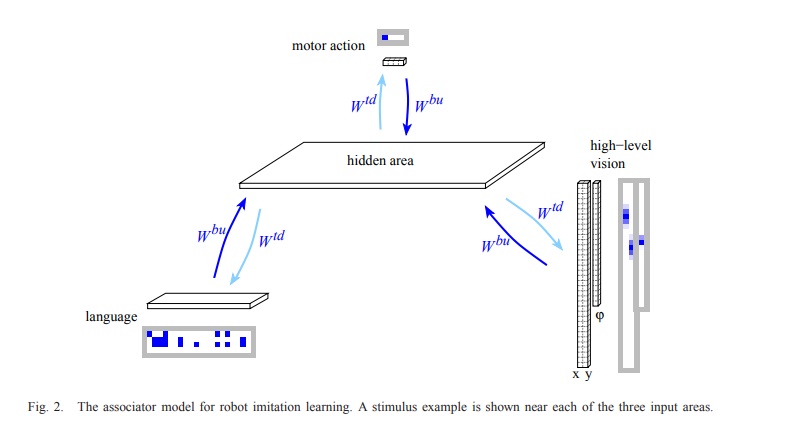
brain modularity and mirror neurons. The model combines
multimodal input based on higher-level vision, motor control and
language so that a simulated student robot is able to learn from
observing three behaviours which are performed by a teacher
robot. The student robot associates these inputs to recognise
the behaviour being performed or to perform behaviours by
language instruction. With behaviour representations segregating
into regions it models aspects of the mirror neuron system as
similar patterns of neural activation are involved in recognition
and performance.

@InProceedings{EWZW04a,
author = {Elshaw, Mark I. and Weber, Cornelius and Zochios, Alex and Wermter, Stefan},
title = {An Associator Network Approach to Robot Learning by Imitation through Vision, Motor Control and Language},
booktitle = {Proceedings of the International Joint Conference on Neural Networks},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {591--596},
year = {2004},
month = {Jul},
publisher = {IEEE},
doi = {}
url = {None},
}