Towards Integrating Learning by Demonstration and Learning by Instruction in a Multimodal Robotics
Proceedings of the IROS-2003 Workshop on Robot Learning by Demonstration,
pages 72--79,
- Oct 2003
Associated documents :

Learning by demonstration and learning by
instruction offers a potentially more powerful paradigm than
programming robots directly for specific tasks. Learning in
humans or primates substantially benefits from demonstration of actions or instruction by language in the appropriate
context and there is initial neurocognitive cortical evidence
for such processes. Cortical assemblies have been identified
in the cortex that activate in response to the performance
of motor tasks at a semantic level. This evidence supports
that such mirror neuron assemblies are involved in actions,
observing actions and communicating actions. Furthermore,
neurocognitive evidence supports that cell assemblies are
activated in different regions of the brain dependent on the
action type being processed. Based on this neurocognitive
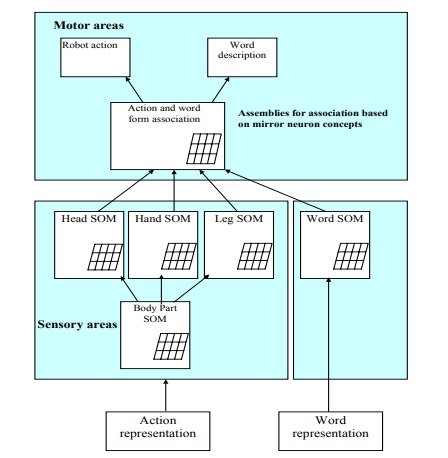
evidence we have begun to design a neural robot in the
MirrorBot project that is based on multimodal integration
and topological organisation of actions using associative
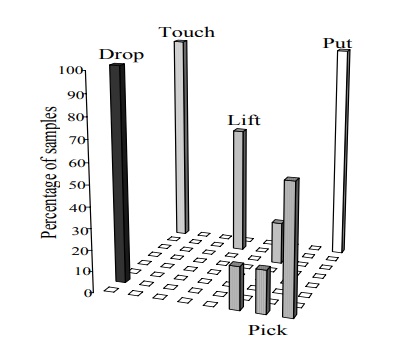
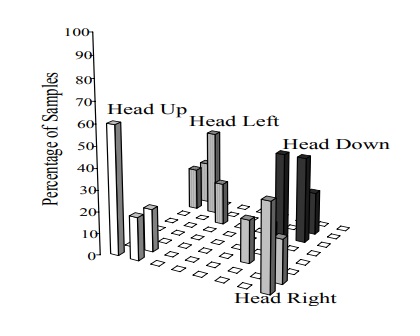
memory. As part of these studies in this paper we describe
a self-organising model that clusters actions into different
locations dependent on the body part they are associated
with. In particular, we use actual sensor readings from the
MIRA robot to represent semantic features of the action
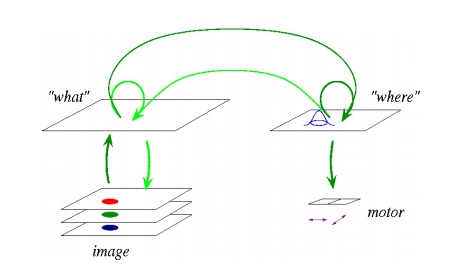
verbs. Furthermore, ongoing work focuses on integration of
motor, vision and language representations for learning from
demonstration and language instruction.

@InProceedings{WEWPE03,
author = {Wermter, Stefan and Elshaw, Mark I. and Weber, Cornelius and Panchev, Christo and Erwin, Harry},
title = {Towards Integrating Learning by Demonstration and Learning by Instruction in a Multimodal Robotics},
booktitle = {Proceedings of the IROS-2003 Workshop on Robot Learning by Demonstration},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {72--79},
year = {2003},
month = {Oct},
publisher = {None},
doi = {}
url = {None},
}