A Modular Approach to Self-organisation of Robot Control Based on Language Instruction
Connection Science,
Volume 15,
Number 2--3,
pages 73--94,
doi: 10.1080/09540090310001629308
- May 2003
Associated documents :


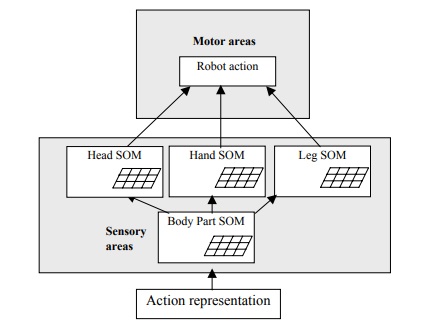
In this paper we focus on how instructions for actions can be modelled in a selforganising memory. Our approach draws from the concepts of regional distributed
modularity and self-organisation. We describe a self-organising model that clusters
action representations into different locations dependent on the body part they are related
to. In the first case study we consider semantic representations of action verb meaning
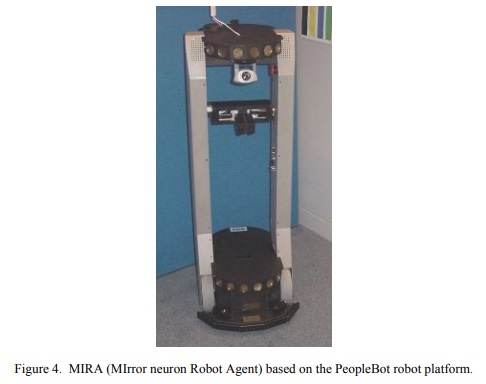
and then extend this concept significantly in a second case study by using actual sensor
readings from our MIRA robot. Furthermore, we outline a modular model for a selforganising robot action control system using language for instruction. Our approach for
robot control using language incorporates some evidence related to the architectural and
processing characteristics of the brain (Wermter et al. 2001b). This paper focuses on the
neurocognitive clustering of actions and regional modularity for language areas in the
brain. In particular, we describe a self-organising network that realises action clustering
(Pulvermüller 2003).
@Article{WEF03,
author = {Wermter, Stefan and Elshaw, Mark I. and Farrand, Simon},
title = {A Modular Approach to Self-organisation of Robot Control Based on Language Instruction},
booktitle = {None},
journal = {Connection Science},
editors = {None},
number = {2--3},
volume = {15},
pages = {73--94},
year = {2003},
month = {May},
publisher = {Taylor & Francis},
doi = {10.1080/09540090310001629308},
url = {}
}