Reward-Driven Learning of Sensorimotor Laws and Visual Features
Proceedings of the 1st Joint IEEE International Conference on Development and Learning and on Epigenetic Robotics,
Volume 2,
pages 1--6,
doi: 10.1109/DEVLRN.2011.6037358
- Aug 2011
Associated documents :


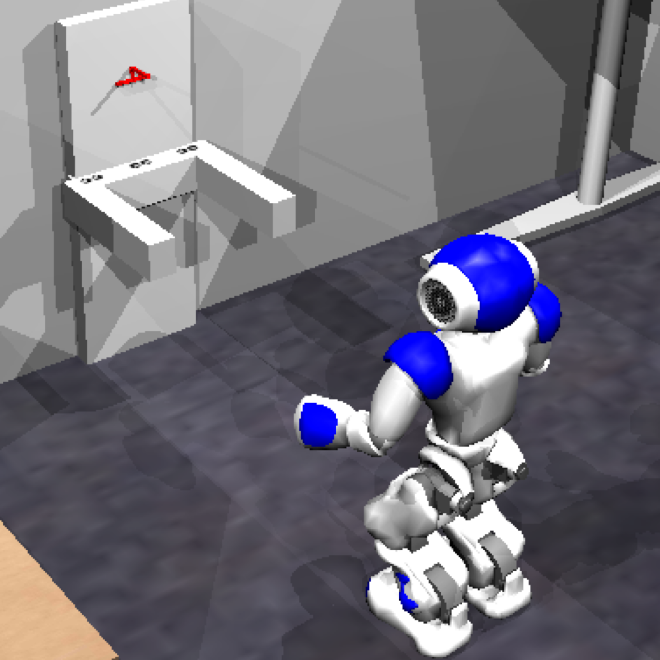
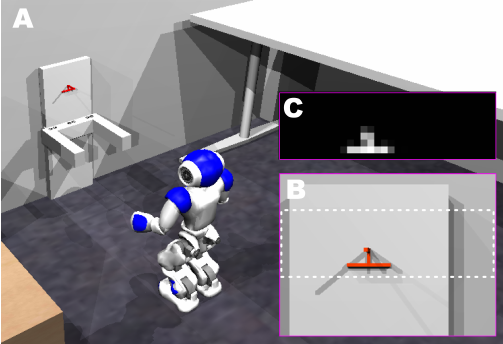
A frequently reoccurring task of humanoid robots
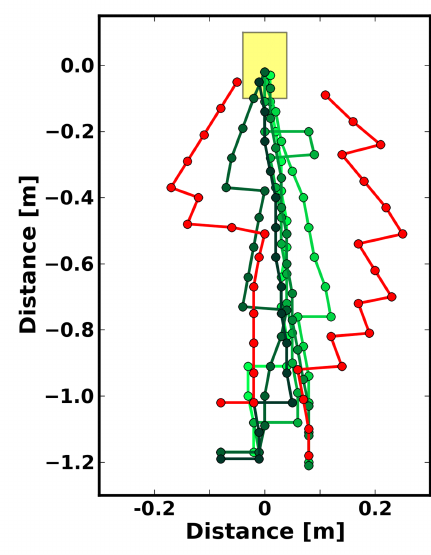
is the autonomous navigation towards a goal position. Here we
present a simulation of a purely vision-based docking behavior
in a 3-D physical world. The robot learns sensorimotor laws and
visual features simultaneously and exploits both for navigation
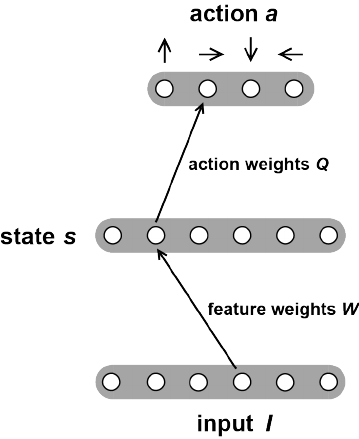
towards its virtual target region. The control laws are trained
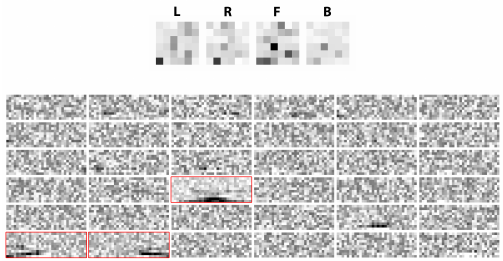
using a two-layer network consisting of a feature (sensory)
layer that feeds into an action (Q-value) layer. A reinforcement
feedback signal (delta) modulates not only the action but at
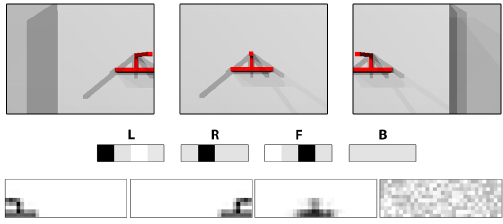
the same time the feature weights. Under this influence, the
network learns interpretable visual features and assigns goaldirected actions successfully. This is a step towards investigating
how reinforcement learning can be linked to visual perception.
@InProceedings{KWWE11,
author = {Kleesiek, Jens and Weber, Cornelius and Wermter, Stefan and Engel, Andreas K.},
title = {Reward-Driven Learning of Sensorimotor Laws and Visual Features},
booktitle = {Proceedings of the 1st Joint IEEE International Conference on Development and Learning and on Epigenetic Robotics},
journal = {None},
editors = {}
number = {}
volume = {2},
pages = {1--6},
year = {2011},
month = {Aug},
publisher = {IEEE},
doi = {10.1109/DEVLRN.2011.6037358},
url = {None},
}