A Predictive Network Architecture for a Robust and Smooth Robot Docking Behavior
Paladyn. Journal of Behavioral Robotics,
Volume 3,
Number 4,
pages 172--180,
doi: 10.2478/s13230-013-0106-8
- 2012
Associated documents :


Robots and living beings exhibit latencies in their sensorimotor processing due to mechanical and electronic or neural processing delays. A
reaction typically occurs to input stimuli of the past. This is critical not
only when the environment changes (e.g. moving objects) but also when
the agent itself moves. An agent that does not predict while moving may
need to remain static between sensory input acquisition and output response
to guarantee that the response is appropriate to the percept. We propose a
biologically-inspired learning model of predictive sensorimotor integration
to compensate for this latency. In this model, an Elman network is developed for sensory prediction and sensory filtering; a Continuous Actor-Critic
Learning Automaton (CACLA) is trained for continuous action generation.
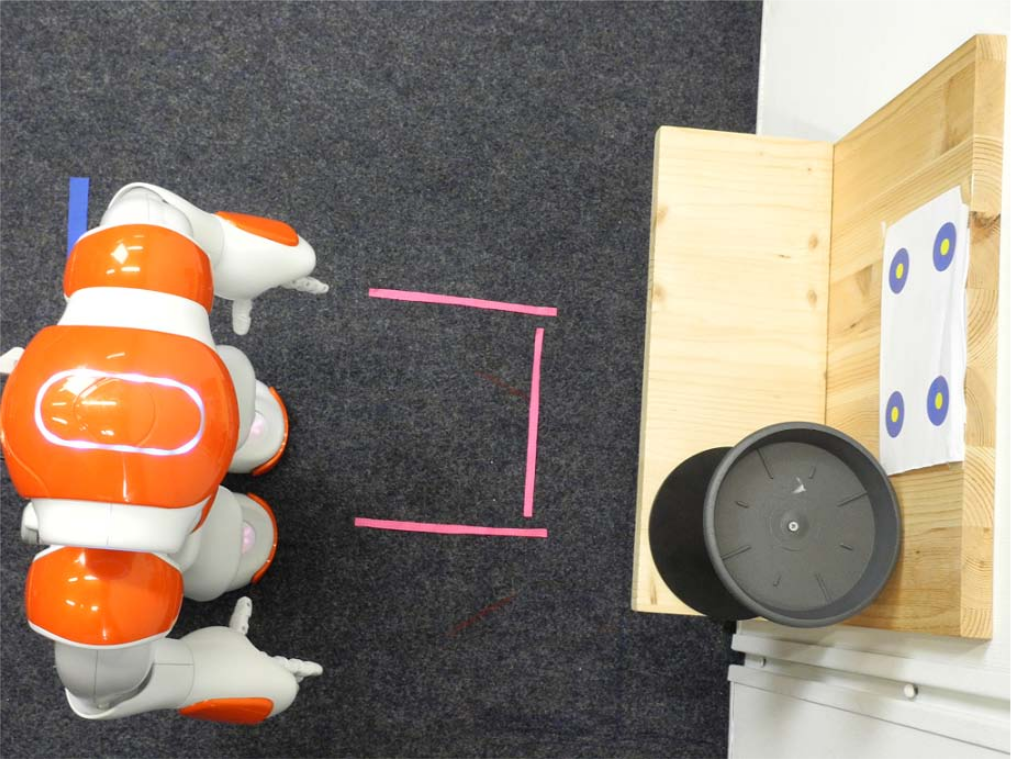
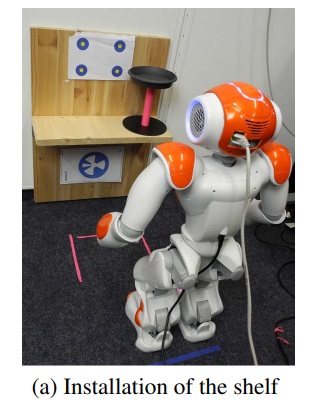
For a robot docking experiment, this architecture improves the smoothness
of the robots sensory input and therefore results in a faster and more accurate continuous approach behavior.
@Article{ZWW12,
author = {Zhong, Junpei and Weber, Cornelius and Wermter, Stefan},
title = {A Predictive Network Architecture for a Robust and Smooth Robot Docking Behavior},
booktitle = {None},
journal = {Paladyn. Journal of Behavioral Robotics},
editors = {None},
number = {4},
volume = {3},
pages = {172--180},
year = {2012},
month = {}
publisher = {Springer},
doi = {10.2478/s13230-013-0106-8},
url = {None},
}