What Do Objects Feel Like? - Active Perception for a Humanoid Robot
Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART 2012),
Volume 1,
pages 64--73,
doi: 10.5220/0003729900640073
- Jan 2012
Associated documents :


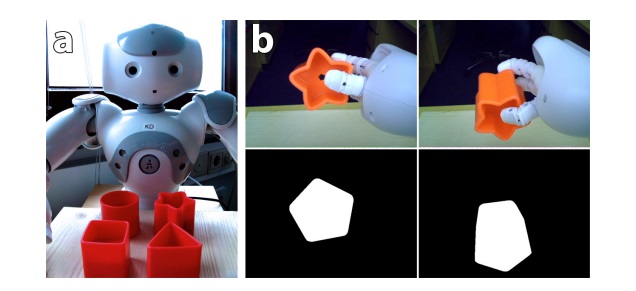
We present a recurrent neural architecture with parametric bias for actively perceiving objects. A humanoid
robot learns to extract sensorimotor laws and based on those to classify eight objects by exploring their multimodal sensory characteristics. The network is either trained with prototype sequences for all objects or just two
objects. In both cases the network is able to self-organize the parametric bias space into clusters representing
individual objects and due to that, discriminates all eight categories with a very low error rate. We show that
the network is able to retrieve stored sensory sequences with a high accuracy. Furthermore, trained with only
two objects it is still able to generate fairly accurate sensory predictions for unseen objects. In addition, the
approach proves to be very robust against noise.
@InProceedings{KBWE12a,
author = {Kleesiek, Jens and Badde, Stephanie and Wermter, Stefan and Engel, Andreas K.},
title = {What Do Objects Feel Like? - Active Perception for a Humanoid Robot},
booktitle = {Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART 2012)},
journal = {None},
editors = {}
number = {}
volume = {1},
pages = {64--73},
year = {2012},
month = {Jan},
publisher = {SciTePress},
doi = {10.5220/0003729900640073},
url = {None},
}