Improving Humanoid Robot Speech Recognition with Sound Source Localisation
Artificial Neural Networks and Machine Learning - ICANN 2014,
Editors: Wermter, Stefan; Weber, Cornelius; Duch, Wlodislaw; Honkela, Timo; Koprinkova-Hristova, Petia; Magg, Sven; Palm, Günther.; Villa, Alessandro E.P.,
pages 619--626,
doi: 10.1007/978-3-319-11179-7_78
- Sep 2014
Associated documents :


In this paper we propose an embodied approach to automatic
speech recognition, where a humanoid robot adjusts its orientation to the
angle that increases the signal-to-noise ratio of speech. In other words,
the robot turns its face to hear the speaker better, similar to what
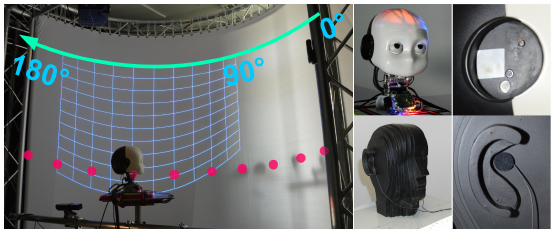
people with auditory deficiencies do. The robot tracks a speaker with a
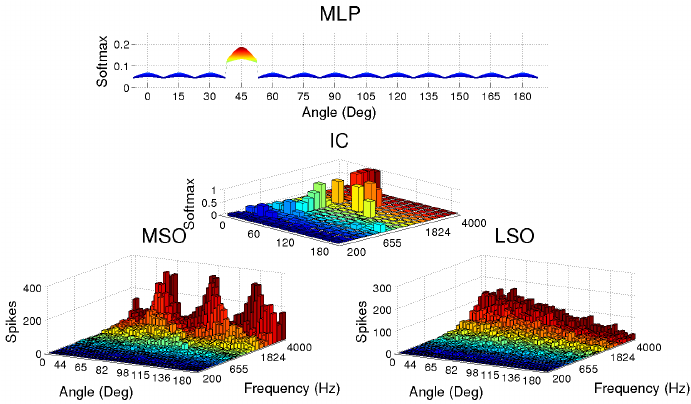
binaural sound source localisation system (SSL) that uses spiking neural
networks to model relevant areas in the mammalian auditory pathway
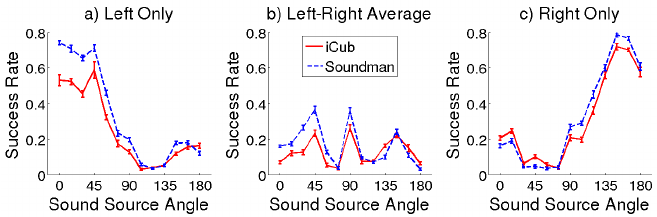
for SSL. The accuracy of speech recognition is doubled when the robot
orients towards the speaker in an optimal angle and listens only through
one ear instead of averaging the input from both ears.
@InProceedings{DTLW14,
author = {Dávila-Chacón, Jorge and Twiefel, Johannes and Liu, Jindong and Wermter, Stefan},
title = {Improving Humanoid Robot Speech Recognition with Sound Source Localisation},
booktitle = {Artificial Neural Networks and Machine Learning - ICANN 2014},
journal = {None},
editors = {Wermter, Stefan; Weber, Cornelius; Duch, Wlodislaw; Honkela, Timo; Koprinkova-Hristova, Petia; Magg, Sven; Palm, Günther.; Villa, Alessandro E.P.},
number = {}
volume = {}
pages = {619--626},
year = {2014},
month = {Sep},
publisher = {Springer Heidelberg},
doi = {10.1007/978-3-319-11179-7_78},
url = {None},
}