Neural End-to-End Self-learning of Visuomotor Skills by Environment Interaction
Artificial Neural Networks and Machine Learning – ICANN 2017,
Editors: Lintas A., Rovetta S., Verschure P., Villa A.,
Volume 10613,
pages 27-34,
doi: 10.1007/978-3-319-68600-4_4
- Sep 2017
Associated documents :


Deep learning with neural networks is dependent on large
amounts of annotated training data. For the development of robotic visuomotor skills in complex environments, generating suitable training
data is time-consuming and depends on the availability of accurate robot
models. Deep reinforcement learning alleviates this challenge by letting
robots learn in an unsupervised manner through trial and error at the
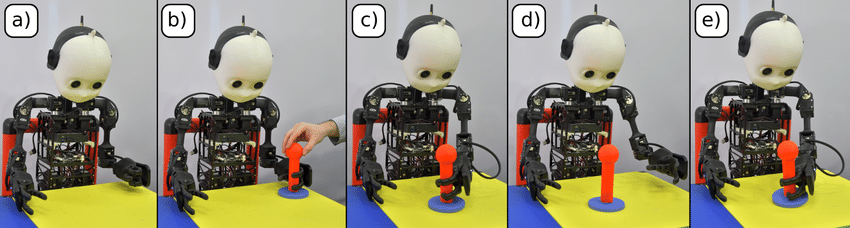
cost of long training times. In contrast, we present an approach for acquiring visuomotor skills for grasping through fast self-learning: The robot
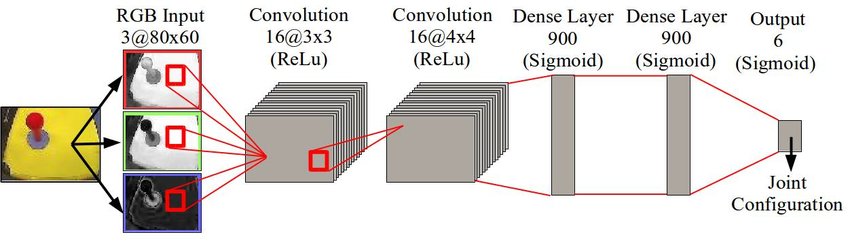
generates suitable training data through interaction with the environment based on initial motor abilities. Supervised end-to-end learning of
visuomotor skills is realized with a deep convolutional neural architecture
that combines two important subtasks of grasping: object localization
and inverse kinematics.
@InProceedings{KW17,
author = {Kerzel, Matthias and Wermter, Stefan},
title = {Neural End-to-End Self-learning of Visuomotor Skills by Environment Interaction},
booktitle = {Artificial Neural Networks and Machine Learning – ICANN 2017},
journal = {None},
editors = {Lintas A., Rovetta S., Verschure P., Villa A.},
number = {}
volume = {10613},
pages = {27-34},
year = {2017},
month = {Sep},
publisher = {Springer, Cham},
doi = {10.1007/978-3-319-68600-4_4},
url = {None},
}