Semantic Role Labelling for Robot Instructions using Echo State Networks
European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN),
pages 695--700,
- May 2016
Associated documents :

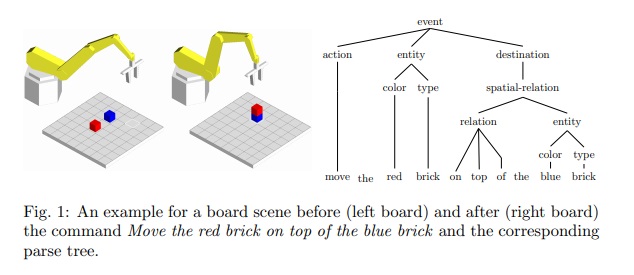
To control a robot in a real-world robot scenario, a real-time
parser is needed to create semantic representations from natural language
which can be interpreted. The parser should be able to create the hierarchical tree-like representations without consulting external systems to
show its learning capabilities. We propose an efficient Echo State Networkbased parser for robotic commands and only relies on the training data.
The system generates a single semantic tree structure in real-time which
can be executed by a robot arm manipulating objects. Four of six other
approaches, which in most cases generate multiple trees and select one of
them as the solution, were outperformed with 64.2% tree accuracy on difficult unseen natural language (74.1% under best conditions) on the same
dataset.
@InProceedings{THW16,
author = {Twiefel, Johannes and Hinaut, Xavier and Wermter, Stefan},
title = {Semantic Role Labelling for Robot Instructions using Echo State Networks},
booktitle = {European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN)},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {695--700},
year = {2016},
month = {May},
publisher = {None},
doi = {}
url = {None},
}