Humanoidly speaking--learning about the world and language with a humanoid friendly robot
IJCAI Video competition, Buenos Aires, Argentina,
- Jul 2015
Associated documents :

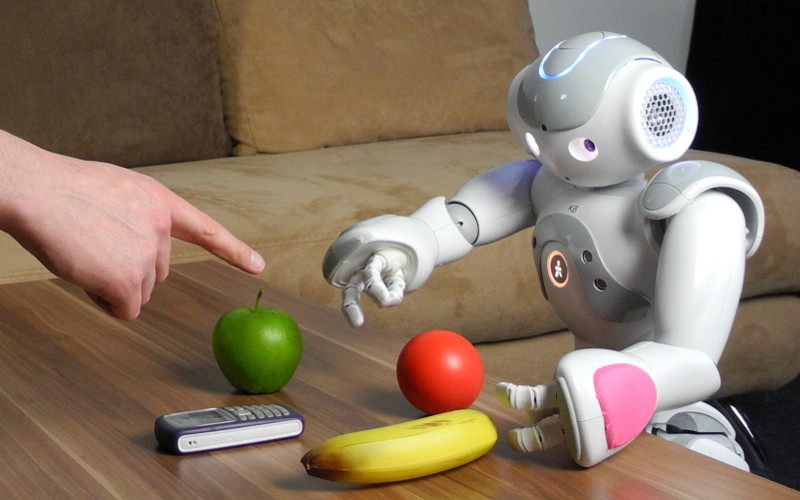
This video shows a friendly human-robot interaction using humanoid Nao
robots. The speaker teaches the robot some names of objects using
speech. This work shows the successful integration of three different
projects mainly using Artificial Neural Networks: (1) object
recognition with RGB-D (color and depth) sensor, (2) speech to text
using an approach that post-processes Google's speech recognition
hypotheses, and (3) syntactic interpretation of sentences.
The robot is able to identify surfaces in the environment (tables,
floor, walls) and establish a relation between these surfaces and the
clusters (objects). Multiple viewpoints are easily obtained from the
segmented clusters and used for training a Convolutional Neural
Network. The features obtained allow the robot to recognise objects and
to generalise to unknown viewpoints and scales.
The speech recognition system maps the results from Google to
expectable sentences in the given scenario using phonemic matching. The
syntactic interpretation of the sentence is done with a Recurrent
Neural Network (namely an Echo State Network). It maps each semantic
word in a sentence to its thematic role. In the end, all roles form
predicates which indicate what should be performed (e.g. learning a new
object or performing motor actions).
At the start, the robot does not know any objects. During the learning
of new objects, increasingly complex sentences are used to describe the
position of new objects. Motor commands (e.g. pointing) are also
provided in order to check the knowledge of the robot. It can be noted
that the human user produces natural complex sentences, and thus any
human could interact with the robot, not only robot programmers.
Furthermore, complex sentences containing multiple commands can be
correctly interpreted as a temporal action sequence (e.g. "Before doing
'B' do 'A'") without adding any complementary mechanism.
@InProceedings{HTBMW15,
author = {Hinaut, Xavier and Twiefel, Johannes and Borghetti, Marcelo and Mici, Luiza and Wermter, Stefan},
title = {Humanoidly speaking--learning about the world and language with a humanoid friendly robot},
booktitle = {IJCAI Video competition, Buenos Aires, Argentina},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {}
year = {2015},
month = {Jul},
publisher = {None},
doi = {}
url = {None},
}