Towards Open-Ended Learning of Action Sequences with Hierarchical Predictive Self-Organization
IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Workshop on Behaviours Adaptation, Interaction and Learning for Assistive Robotics,
- Aug 2016
Associated documents :

Open-ended learning is fundamental in autonomous robotics for the incremental acquisition of knowledge
through experience. However, most of the proposed computational models for action recognition do not account for
incremental learning, but rather learn a batch of training
actions without adapting to new inputs presented after training
sessions. Therefore, this is the need to provide robots with the
ability to incrementally process a set of available perceptual
cues and to adapt their behavioural responses over time. In
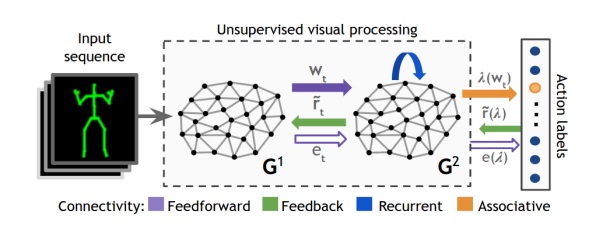
this work, we propose a neural network architecture with
multilayer-predictive processing for incrementally learning action sequences. Our architecture comprises a hierarchy of selforganizing networks that progressively learn the spatiotemporal
structure of the input using Hebbian-like plasticity. Along the
hierarchical flow with increasingly larger temporal receptive
fields, feedback connections from higher-order networks carry
predictions of lower-level neural activation patterns, whereas
feedforward connections convey residual errors between the
predictions and the lower-level activity. This mechanism is used
to modulate the amount of learning necessary to adapt to the
dynamic input distribution and develop robust action representations. We present a simplified hierarchical architecture with
two layers and describe a number of planned experiments for
classifying human actions in an open-ended learning scenario.
@InProceedings{PW16a,
author = {Parisi, German I. and Wermter, Stefan},
title = {Towards Open-Ended Learning of Action Sequences with Hierarchical Predictive Self-Organization},
booktitle = {IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Workshop on Behaviours Adaptation, Interaction and Learning for Assistive Robotics},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {}
year = {2016},
month = {Aug},
publisher = {None},
doi = {}
url = {None},
}