Comparison of Behaviour-Based Architectures for Human-Robot Collaboration in a Package Delivery Task
International Conference on Human-Agent Interaction (HAI),
Volume 5th,
pages 121--129,
doi: 10.1145/3125739.3125764
- Oct 2017

Associated documents :


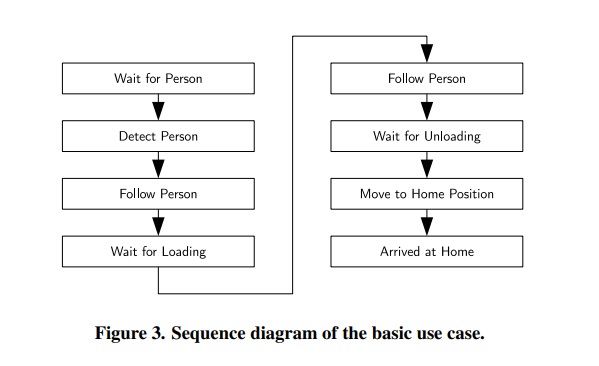
A comparison between behavioural architectures, specifically a BDI architecture and a finite-state machine, for a collaborative package delivery system is presented. The system should assist a user in handling packages in cluttered environments. The entire system is built using open-source solutions for modules including speech recognition, person detection and tracking, and navigation. For the comparison, we use three criteria, namely, a static implementation-based comparison, a dynamic comparison and a qualitative comparison. Based on our results, we provide experimental evidence that supports the theoretical consensus about the domain of applicability for both, BDI architectures and finite-state machines. However, we cannot support or discourage any of the tested architectures for the particular case of the collaborative package delivery scenario, due to the non-overlapping strengths and weakness of both approaches. Finally, we outline future improvements to the system itself as well as the comparison of both behavioural architectures.

@InProceedings{RNW17,
author = {Remmels, Melanie and Navarro-Guerrero, Nicolás and Wermter, Stefan},
title = {Comparison of Behaviour-Based Architectures for Human-Robot Collaboration in a Package Delivery Task},
booktitle = {International Conference on Human-Agent Interaction (HAI)},
journal = {None},
editors = {}
number = {}
volume = {5th},
pages = {121--129},
year = {2017},
month = {Oct},
publisher = {ACM},
doi = {10.1145/3125739.3125764},
url = {None},
}