Actor-Critic Learning for Platform-Independent Robot Navigation
Cognitive Computation,
Volume 1,
Number 3,
pages 203--220,
doi: 10.1007/s12559-009-9021-z
- Sep 2009
Associated documents :


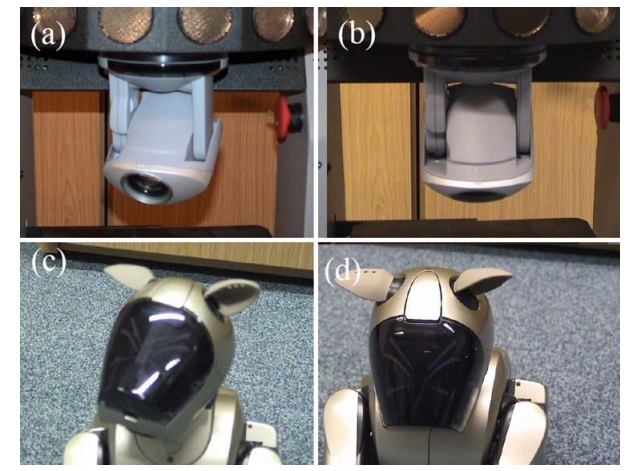
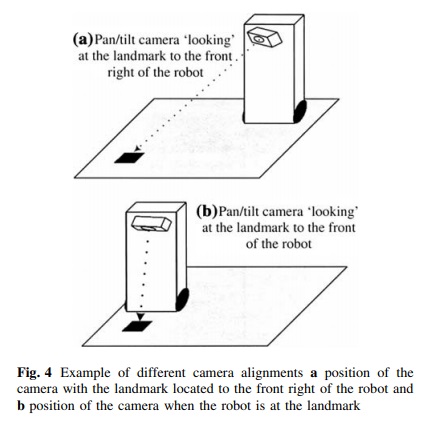
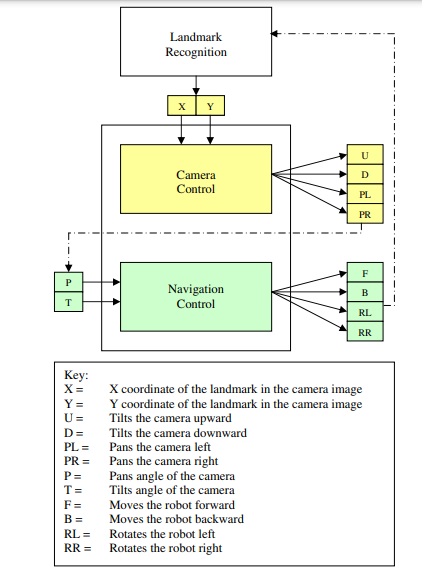
This article describes an approach in the field of reinforcement learning for robot control and a new Modular Actor-Critic architecture which supports platform-independentrobot control. The architecture is tested on a landmark approaching task using movable pan/tilt cameras which successfully control both a large PeopleBot and a small Sony Aibo robot to perform the navigation task, with no retraining required. The architecture provides insight into the skills transfer between different robotic platforms and the modularisation of the architecture derived from splitting the control tasks into their component parts. The architecture and underlying principles could be used in rapid prototyping of new robotic platforms, where an already functioning control system can be used to allow more sophisticated navigation.


@Article{MW09a,
author = {Muse, David and Wermter, Stefan},
title = {Actor-Critic Learning for Platform-Independent Robot Navigation},
booktitle = {None},
journal = {Cognitive Computation},
editors = {None},
number = {3},
volume = {1},
pages = {203--220},
year = {2009},
month = {Sep},
publisher = {Springer},
doi = {10.1007/s12559-009-9021-z},
url = {None},
}