Learning of Neurobotic Visuomotor Abilities based on Interactions with the Environment
Proceedings of the DGR Days 2017,
Editors: Asfour, Tamim and Beetz, Michael,
pages 14--15,
- Nov 2017
Associated documents :

Robotic visuomotor abilities, like grasping, can
either be realized through conventional means of independent
modules for subtasks like object localization, grasp planning,
and inverse kinematics. These modules, however, rely on the
availability of accurate robot and environment models. An
alternative is to acquire visuomotor abilities through end-toend machine learning. While deep neural networks have proved
successful in many areas, they depend on large amounts of
annotated training data or long periods of trial-and-error
learning.
To overcome this issue, developmental robotics leverages
principles of incremental learning in biological agents. Increasingly complex visuomotor abilities are learned through mostly
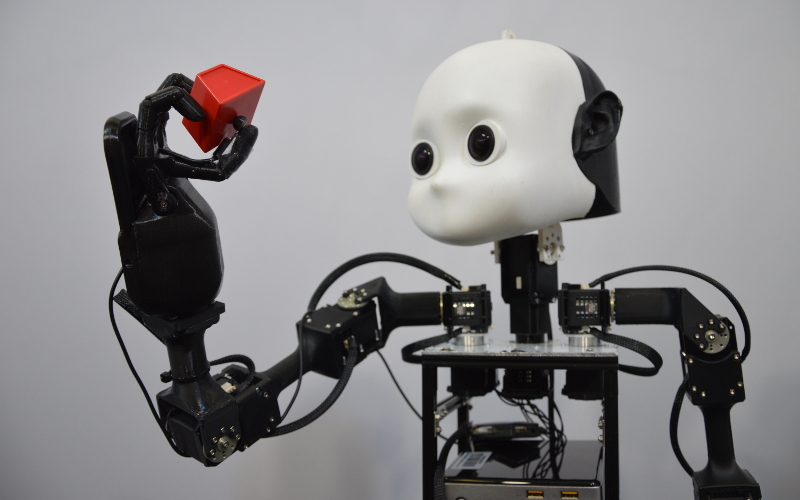
autonomous interaction with the environment. Following this
paradigm, we present current research on acquiring visuomotor
skills with a humanoid robot through self-learning and minimal
human assistance. The robot engages in a learning cycle where
it repeatedly manipulates an object to gather training samples
that link its actions (joint configurations) to states of the
environment (images from the robots perspective). Human
assistance is only requested if errors occur during this phase,
e.g., the training object is accidentally dropped out of reach.
Based on these training samples, supervised end-to-end learning
of visuomotor skills is realized with a deep convolutional neural
architecture. The results show that the approach generalizes
well to novel objects that were not included in learning. To
enable this research, we developed NICO, the Neuro Inspired
COmpanion, a humanoid research platform for embodied
neurobotic models and human-robot interaction.
@InProceedings{KW17a,
author = {Kerzel, Matthias and Wermter, Stefan},
title = {Learning of Neurobotic Visuomotor Abilities based on Interactions with the Environment},
booktitle = {Proceedings of the DGR Days 2017},
journal = {None},
editors = {Asfour, Tamim and Beetz, Michael},
number = {}
volume = {}
pages = {14--15},
year = {2017},
month = {Nov},
publisher = {None},
doi = {}
url = {None},
}