Slowness-based neural visuomotor control with an Intrinsically motivated Continuous Actor-Critic
Proceedings of the 26th European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN),
pages 509--514,
- Apr 2018
Associated documents :

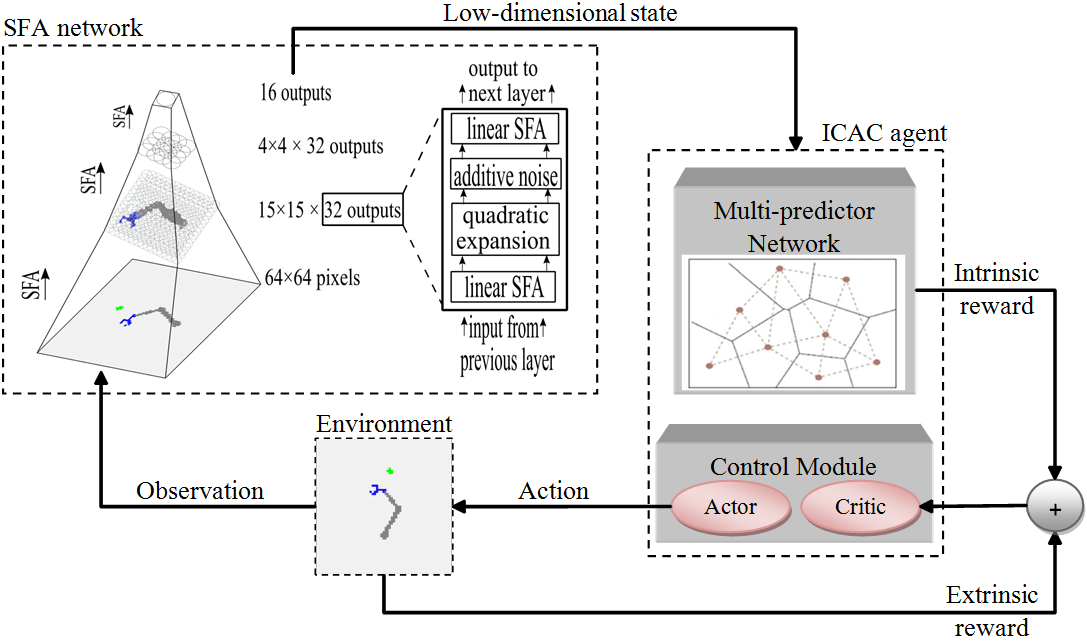
In this paper, we present a new visually guided exploration approach for
autonomous learning of visuomotor skills. Our approach uses hierarchical Slow
Feature Analysis for unsupervised learning of efficient state representation and an
Intrinsically motivated Continuous Actor-Critic learner for neuro-optimal control.
The system learns online an ensemble of local forward models and generates an
intrinsic reward based on the learning progress of each learned forward model.
Combined with the external reward, the intrinsic reward guides the systems
exploration strategy. We evaluate the approach for the task of learning to reach an
object using raw pixel data in a realistic robot simulator. The results show that the
control policies learned with our approach are significantly better both in terms of
length and average reward than those learned with any of the baseline algorithms.

@InProceedings{HKWW18,
author = {Hafez, Burhan and Kerzel, Matthias and Weber, Cornelius and Wermter, Stefan},
title = {Slowness-based neural visuomotor control with an Intrinsically motivated Continuous Actor-Critic},
booktitle = {Proceedings of the 26th European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN)},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {509--514},
year = {2018},
month = {Apr},
publisher = {None},
doi = {}
url = {None},
}