Enhanced Robot Speech Recognition Using Biomimetic Binaural Sound Source Localization
IEEE Transactions on Neural Networks and Learning Systems,
Volume 30,
Number 1,
pages 138--150,
doi: 10.1109/TNNLS.2018.2830119
- Jan 2019

Associated documents :


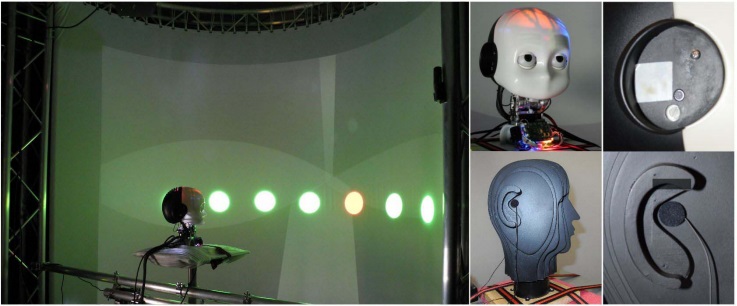
Inspired by the behavior of humans talking in noisy environments, we propose an embodied embedded cognition approach to improve automatic speech recognition (ASR) systems for robots in challenging environments, such as with ego noise, using binaural sound source localization (SSL). The approach is verified by measuring the impact of SSL with a humanoid robot head on the performance of an ASR system. More specifically, a robot orients itself toward the angle where the signal-to-noise ratio (SNR) of speech is maximized for one microphone before doing an ASR task. First, a spiking neural network inspired by the midbrain auditory system based on our previous work is applied to calculate the sound signal angle. Then, a feedforward neural network is used to handle high levels of ego noise and reverberation in the signal. Finally, the sound signal is fed into an ASR system. For ASR, we use a system developed by our group and compare its performance with and without the support from SSL. We test our SSL and ASR systems on two humanoid platforms with different structural and material properties. With our approach we halve the sentence error rate with respect to the common downmixing of both channels. Surprisingly, the ASR performance is more than two times better when the angle between the humanoid head and the sound source allows sound waves to be reflected most intensely from the pinna to the ear microphone, rather than when sound waves arrive perpendicularly to the membrane.
@Article{DLW19,
author = {Dávila-Chacón, Jorge and Liu, Jindong and Wermter, Stefan},
title = {Enhanced Robot Speech Recognition Using Biomimetic Binaural Sound Source Localization},
booktitle = {None},
journal = {IEEE Transactions on Neural Networks and Learning Systems},
editors = {None},
number = {1},
volume = {30},
pages = {138--150},
year = {2019},
month = {Jan},
publisher = {IEEE},
doi = {10.1109/TNNLS.2018.2830119},
url = {None},
}