Object Detection and Pose Estimation based on Convolutional Neural Networks Trained with Synthetic Data
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018,
pages 6269--6276,
doi: 10.1109/IROS.2018.8594379
- Oct 2018
Associated documents :


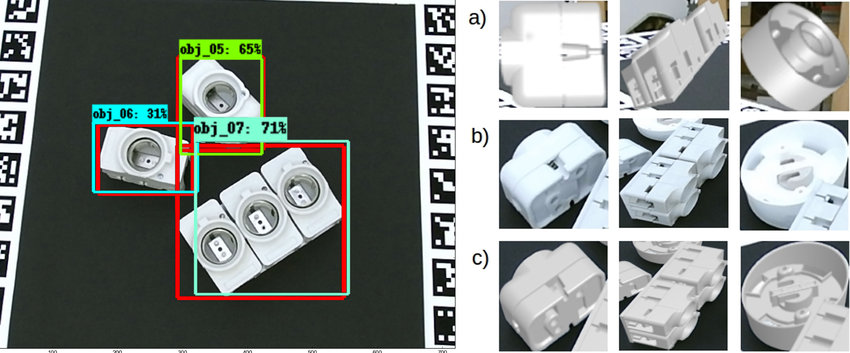
Instance-based object detection and fine pose estimation is an active research problem in computer vision.
While the traditional interest-point-based approaches for pose
estimation are precise, their applicability in robotic tasks relies
on controlled environments and rigid objects with detailed
textures. CNN-based approaches, on the other hand, have
shown impressive results in uncontrolled environments for more
general object recognition tasks like category-based coarse
pose estimation, but the need of large datasets of fullyannotated training images makes them unfavourable for tasks
like instance-based pose estimation.
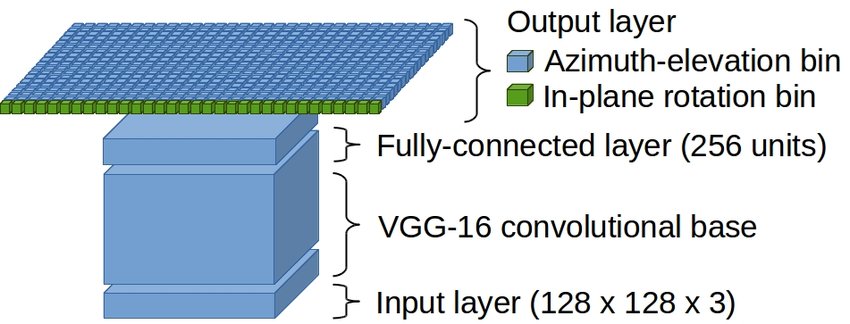
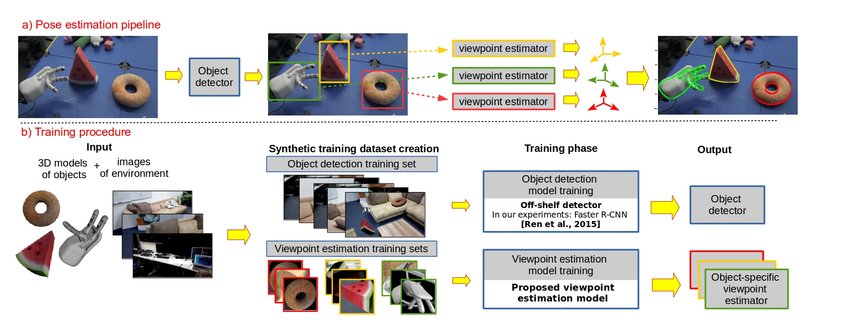
We present a novel approach that combines the robustness of
CNNs with a fine-resolution instance-based 3D pose estimation,
where the model is trained with fully-annotated synthetic
training data, generated automatically from the 3D models of
the objects. We propose an experimental setup in which we can
carefully examine how the model trained with synthetic data
performs on real images of the objects. Results show that the
proposed model can be trained only with synthetic renderings
of the objects 3D models and still be successfully applied on
images of the real objects, with precision suitable for robotic
tasks like object grasping. Based on the results, we present more
general insights about training neural models with synthetic
images for application on real-world images.





@InProceedings{JKPPW18,
author = {Josifovski, Josip and Kerzel, Matthias and Pregizer, Christoph and Posniak, Lukas and Wermter, Stefan},
title = {Object Detection and Pose Estimation based on Convolutional Neural Networks Trained with Synthetic Data},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {6269--6276},
year = {2018},
month = {Oct},
publisher = {None},
doi = {10.1109/IROS.2018.8594379},
url = {None},
}