De-noise-GAN: De-noising Images to Improve RoboCup Soccer Ball Detection
Artificial Neural Networks and Machine Learning – ICANN 2018,
pages 738-744,
doi: 10.1007/978-3-030-01424-7_72
- Oct 2018
Associated documents :


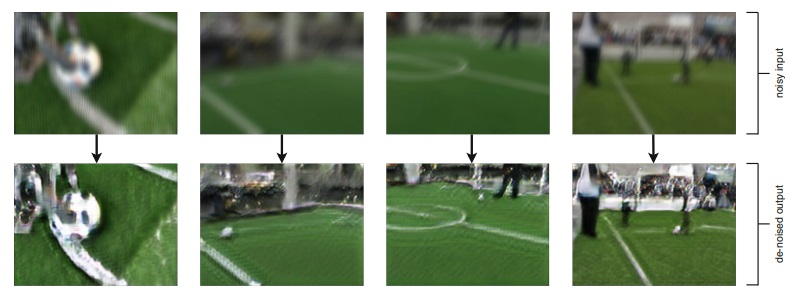
A moving robot or moving camera causes motion blur in the
robots vision and distorts recorded images. We show that motion blur,
differing lighting, and other distortions heavily affect the object localization performance of deep learning architectures for RoboCup Humanoid
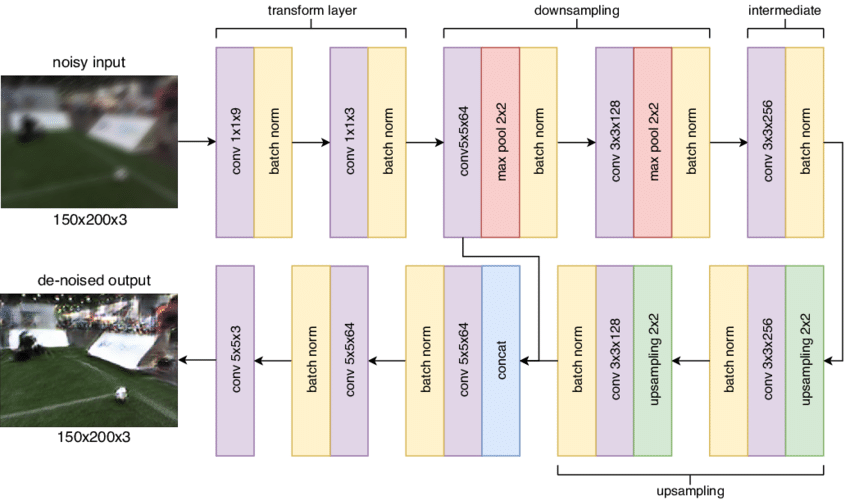
Soccer scenes. The paper proposes deep conditional generative models
to apply visual noise filtering. Instead of generating new samples for a
specific domain our model is constrained by reconstructing RoboCup
soccer images. The conditional DCGAN (deep convolutional generative
adversarial network) works semi-supervised. Thus there is no need for
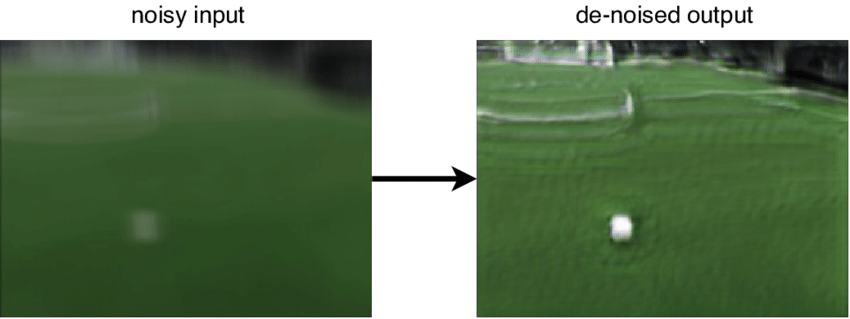
labeled training data. We show that object localization architectures
significantly drop in accuracy when supplied with noisy input data and
that our proposed model can significantly increase the accuracy again.

@InProceedings{SBW18,
author = {Speck, Daniel and Barros, Pablo and Wermter, Stefan},
title = {De-noise-GAN: De-noising Images to Improve RoboCup Soccer Ball Detection},
booktitle = {Artificial Neural Networks and Machine Learning – ICANN 2018},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {738-744},
year = {2018},
month = {Oct},
publisher = {None},
doi = {10.1007/978-3-030-01424-7_72},
url = {None},
}