Curious Meta-Controller: Adaptive Alternation between Model-Based and Model-Free Control in Deep Reinforcement Learning
Proceedings of the International Joint Conference on Neural Networks (IJCNN),
doi: 10.1109/IJCNN.2019.8852254
- Jul 2019
Associated documents :


Recent success in deep reinforcement learning for
continuous control has been dominated by model-free approaches
which, unlike model-based approaches, do not suffer from
representational limitations in making assumptions about the
world dynamics and model errors inevitable in complex domains. However, they require a lot of experiences compared to
model-based approaches that are typically more sample-efficient.
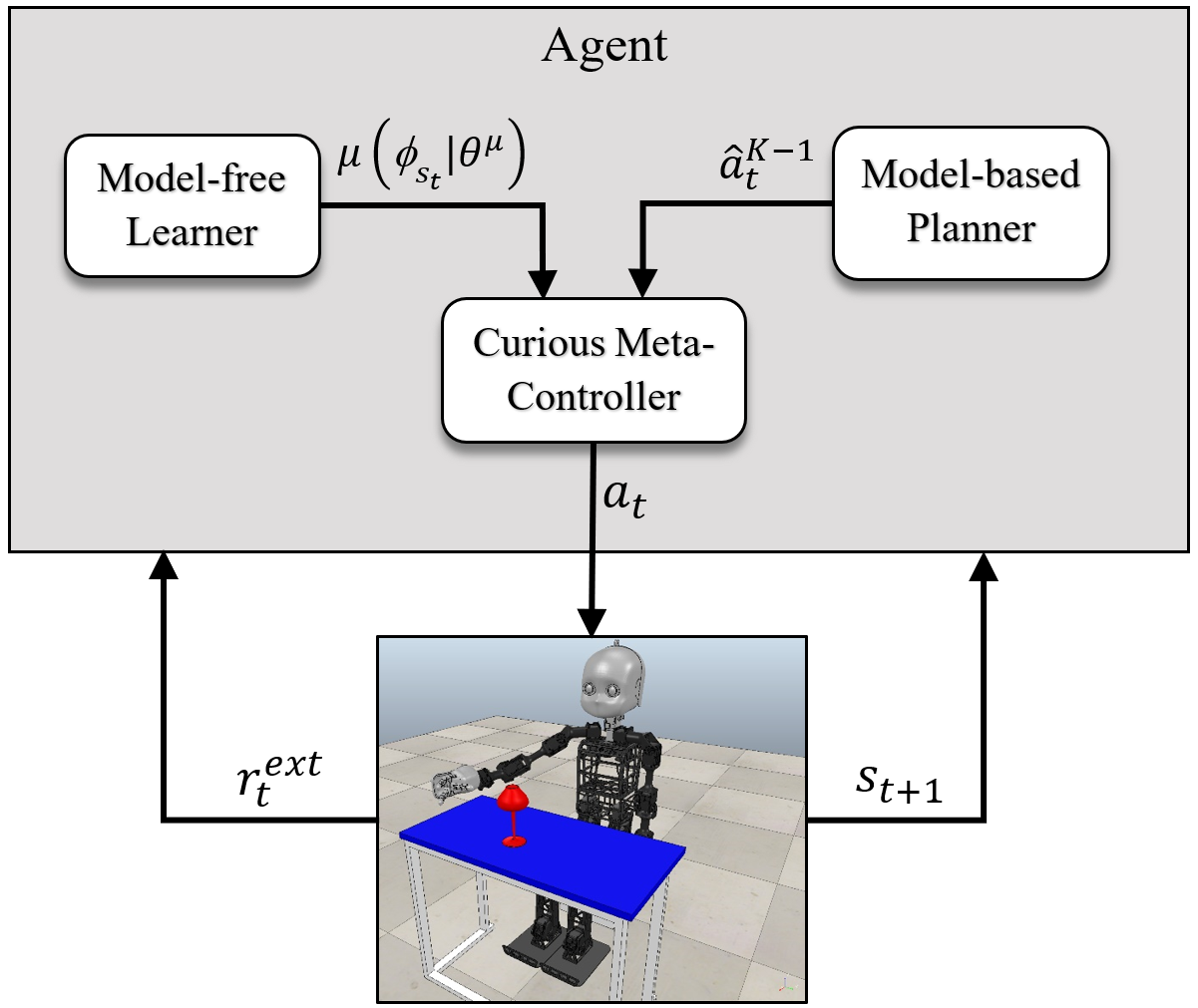
We propose to combine the benefits of the two approaches
by presenting an integrated approach called Curious MetaController. Our approach alternates adaptively between modelbased and model-free control using a curiosity feedback based
on the learning progress of a neural model of the dynamics
in a learned latent space. We demonstrate that our approach
can significantly improve the sample efficiency and achieve nearoptimal performance on learning robotic reaching and grasping
tasks from raw-pixel input in both dense and sparse reward
settings.
@InProceedings{HWKW19a,
author = {Hafez, Burhan and Weber, Cornelius and Kerzel, Matthias and Wermter, Stefan},
title = {Curious Meta-Controller: Adaptive Alternation between Model-Based and Model-Free Control in Deep Reinforcement Learning},
booktitle = {Proceedings of the International Joint Conference on Neural Networks (IJCNN)},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {}
year = {2019},
month = {Jul},
publisher = {None},
doi = {10.1109/IJCNN.2019.8852254},
url = {None},
}