Neuro-Genetic Visuomotor Architecture for Robotic Grasping
Artificial Neural Networks and Machine Learning – ICANN 2020,
Editors: Farkaš, Igor, Masulli, Paolo, Wermter, Stefan,
pages 533-545,
doi: 10.1007/978-3-030-61616-8_43
- Oct 2020
Associated documents :


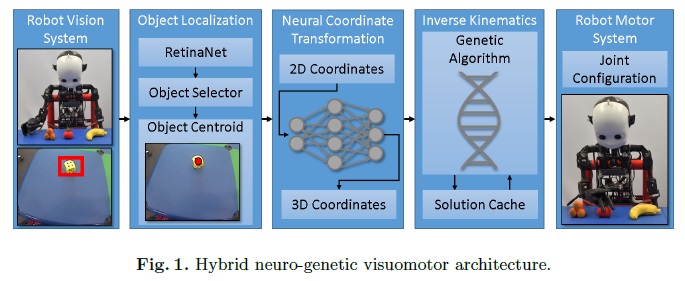
We present a novel, hybrid neuro-genetic visuomotor architecture for object grasping on a humanoid robot. The approach combines
the state-of-the-art object detector RetinaNet, a neural network-based
coordinate transformation and a genetic-algorithm-based inverse kinematics solver. We claim that a hybrid neural architecture can utilise the
advantages of neural and genetic approaches: while the neural components accurately locate objects in the robotâs three-dimensional reference frame, the genetic algorithm allows reliable motor control for the
humanoid, despite its complex kinematics. The modular design enables
independent training and evaluation of the components. We show that
the additive error of the coordinate transformation and inverse kinematics solver is appropriate for a robotic grasping task. We additionally
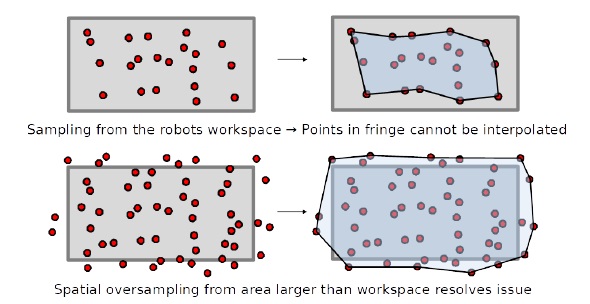
contribute a novel spatial-oversampling approach for training the neural
coordinate transformation that overcomes the known issue of neural networks with extrapolation beyond training data and the extension of the
genetic inverse kinematics solver with numerical fine-tuning. The grasping approach was realised and evaluated on the humanoid robot platform
NICO in a simulation environment.
@InProceedings{KSSW20,
author = {Kerzel, Matthias and Spisak, Josua and Strahl, Erik and Wermter, Stefan},
title = {Neuro-Genetic Visuomotor Architecture for Robotic Grasping},
booktitle = {Artificial Neural Networks and Machine Learning – ICANN 2020},
journal = {None},
editors = {Farkaš, Igor, Masulli, Paolo, Wermter, Stefan},
number = {}
volume = {}
pages = {533-545},
year = {2020},
month = {Oct},
publisher = {Springer},
doi = {10.1007/978-3-030-61616-8_43},
url = {None},
}