An Immersive Investment Game to Study Human-Robot Trust
Frontiers in Robotics and AI,
Volume 8,
pages 139,
doi: 10.3389/frobt.2021.644529
- Jun 2021

Associated documents :


As robots become more advanced and capable, developing trust is an important factor of
human-robot interaction and cooperation. However, as multiple environmental and social
factors can influence trust, it is important to develop more elaborate scenarios and
methods to measure human-robot trust. A widely used measurement of trust in social
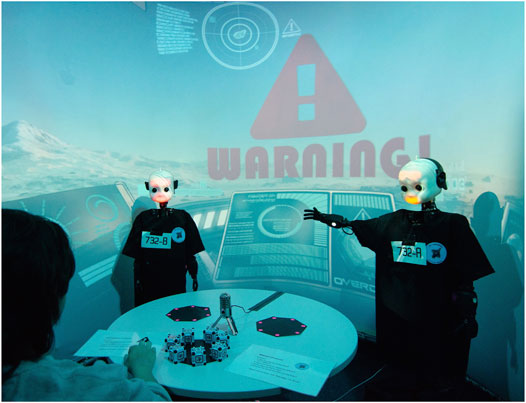
science is the investment game. In this study, we propose a scaled-up, immersive, science
fiction Human-Robot Interaction (HRI) scenario for intrinsic motivation on human-robot
collaboration, built upon the investment game and aimed at adapting the investment game
for human-robot trust. For this purpose, we utilize two Neuro-Inspired COmpanion
(NICO) - robots and a projected scenery. We investigate the applicability of our space
mission experiment design to measure trust and the impact of non-verbal
communication. We observe a correlation of 0.43 (p 0.02) between self-assessed
trust and trust measured from the game, and a positive impact of non-verbal
communication on trust (p 0.0008) and robot perception for anthropomorphism
(p 0.007) and animacy (p 0.00002). We conclude that our scenario is an
appropriate method to measure trust in human-robot interaction and also to study
how non-verbal communication influences a humans trust in robots.
@Article{ZAVSSMBSPAW21,
author = {Zörner, Sebastian and Arts, Emy and Vasiljevic, Brenda and Srivastava, Ankit and Schmalzl, Florian and Mir, Glareh and Bhatia, Kavish and Strahl, Erik and Peters, Annika and Alpay, Tayfun and Wermter, Stefan},
title = {An Immersive Investment Game to Study Human-Robot Trust},
booktitle = {None},
journal = {Frontiers in Robotics and AI},
editors = {None},
number = {}
volume = {8},
pages = {139},
year = {2021},
month = {Jun},
publisher = {Frontiers},
doi = {10.3389/frobt.2021.644529},
url = {None},
}