Robotic Occlusion Reasoning for Efficient Object Existence Prediction
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
doi: 10.1109/IROS51168.2021.9635947
- Oct 2021
Associated documents :


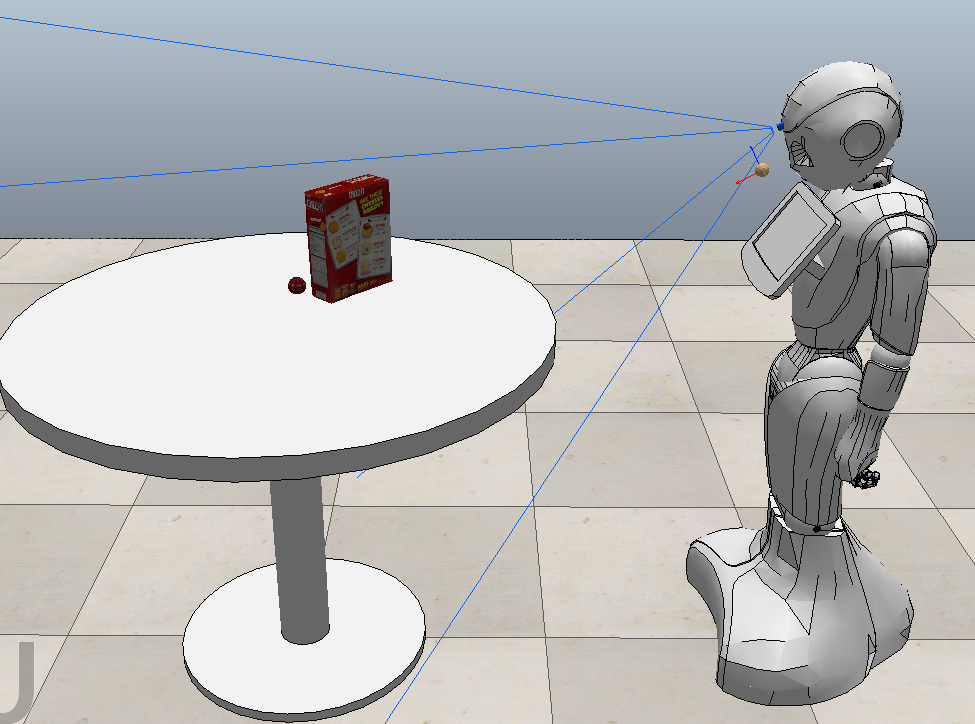
<p>Reasoning about potential occlusions is essential for robots to efficiently predict whether an object exists in an environment. Though existing work shows that a robot with active perception can achieve various tasks, it is still unclear if occlusion reasoning can be achieved. To answer this question, we introduce the task of robotic object existence prediction: when being asked about an object, a robot needs to move as few steps as possible around a table with randomly placed objects to predict whether the queried object exists. To address this problem, we propose a novel recurrent neural network model that can be jointly trained with supervised and reinforcement learning methods using a curriculum training strategy. Experimental results show that 1) both active perception and occlusion reasoning are necessary to successfully achieve the task; 2) the proposed model demonstrates a good occlusion reasoning ability by achieving a similar prediction accuracy to an exhaustive exploration baseline while requiring only about 10% of the baseline's number of movement steps on average; and 3) the model generalizes to novel object combinations with a moderate loss of accuracy.</p>
@InProceedings{LWKLZLW21,
author = {Li, Mengdi and Weber, Cornelius and Kerzel, Matthias and Lee, Jae Hee and Zeng, Zheni and Liu, Zhiyuan and Wermter, Stefan},
title = {Robotic Occlusion Reasoning for Efficient Object Existence Prediction},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {}
year = {2021},
month = {Oct},
publisher = {None},
doi = {10.1109/IROS51168.2021.9635947},
url = {None},
}