Learning to Autonomously Reach Objects with NICO and Grow-When-Required Networks
2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids 2022),
pages 217--222,
- Nov 2022
Associated documents :

The act of reaching for an object is a fundamental
yet complex skill for a robotic agent, requiring a high degree
of visuomotor control and coordination. In consideration of dynamic
environments, a robot capable of autonomously adapting
to novel situations is desired. In this paper, a developmental
robotics approach is used to autonomously learn visuomotor
coordination on the NICO (Neuro-Inspired COmpanion)
platform, for the task of object reaching. The robot interacts
with its environment and learns associations between motor
commands and temporally correlated sensory perceptions based
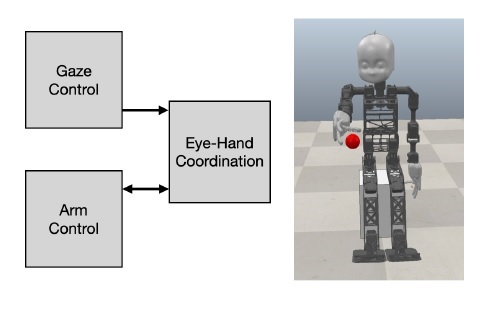
on Hebbian learning. Multiple Grow-When-Required (GWR)
networks are used to learn increasingly more complex motoric
behaviors, by first learning how to direct the gaze towards
a visual stimulus, followed by learning motor control of the
arm, and finally learning how to reach for an object using
eye-hand coordination. We demonstrate that the model is able
to deal with an unforeseen mechanical change in the NICOs
body, showing the adaptability of the proposed approach. In
evaluations of our approach, we show that the humanoid robot
NICO is able to reach objects with a 76% success rate.
@InProceedings{RKADW22,
author = {Rahrakhshan, Nima and Kerzel, Matthias and Allgeuer, Philipp and Duczek, Nicolas and Wermter, Stefan},
title = {Learning to Autonomously Reach Objects with NICO and Grow-When-Required Networks},
booktitle = {2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids 2022)},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {217--222},
year = {2022},
month = {Nov},
publisher = {None},
doi = {}
url = {None},
}