Combining Deep Learning for Visuomotor Coordination with Object Identification to Realize a High-level Interface for Robot Object-picking
IEEE-RAS International Conference on Humanoid Robots (Humanoids),
pages 612--617,
doi: 10.1109/HUMANOIDS.2017.8246935
- Nov 2017
Associated documents :


We present a proof of concept to show how a
deep network for end-to-end visuomotor learning to grasp is
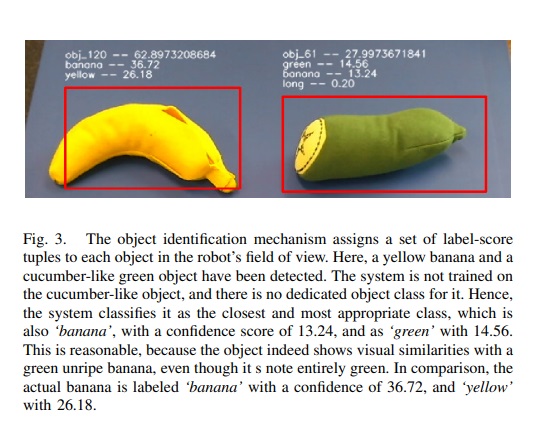
coupled with an attention focus mechanism for state-of-theart object detection with convolutional neural networks. The
cognitively motivated integration of both methods in a single
robotic system allows us to realize a high-level interface to use
the visuomotor network in environments with several objects,
which otherwise would only be usable in environments with a
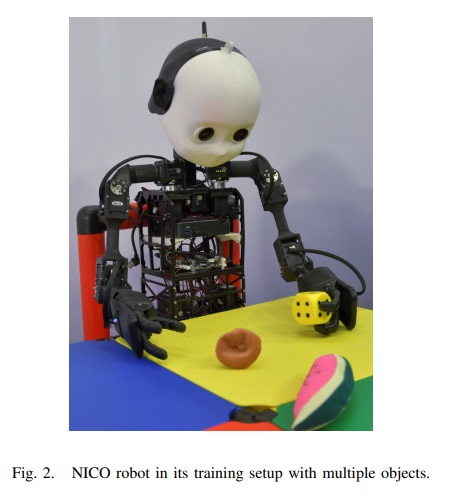
single object. The resulting system is deployed on a humanoid
robot, and we perform several real-world grasping experiments
that demonstrate the feasibility of our approach.

@InProceedings{EKGNW17,
author = {Eppe, Manfred and Kerzel, Matthias and Griffiths, Sascha and Ng, Hwei Geok and Wermter, Stefan},
title = {Combining Deep Learning for Visuomotor Coordination with Object Identification to Realize a High-level Interface for Robot Object-picking},
booktitle = {IEEE-RAS International Conference on Humanoid Robots (Humanoids)},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {612--617},
year = {2017},
month = {Nov},
publisher = {None},
doi = {10.1109/HUMANOIDS.2017.8246935},
url = {None},
}