Neurocognitive Shared Visuomotor Network for End-to-end Learning of Object Identification, Localization and Grasping on a Humanoid
2019 Joint IEEE International Conference on Development and Learning and Epigenetic Robotics (ICDL-EpiRob),
pages 19--24,
doi: 10.1109/DEVLRN.2019.8850679
- Aug 2019
Associated documents :


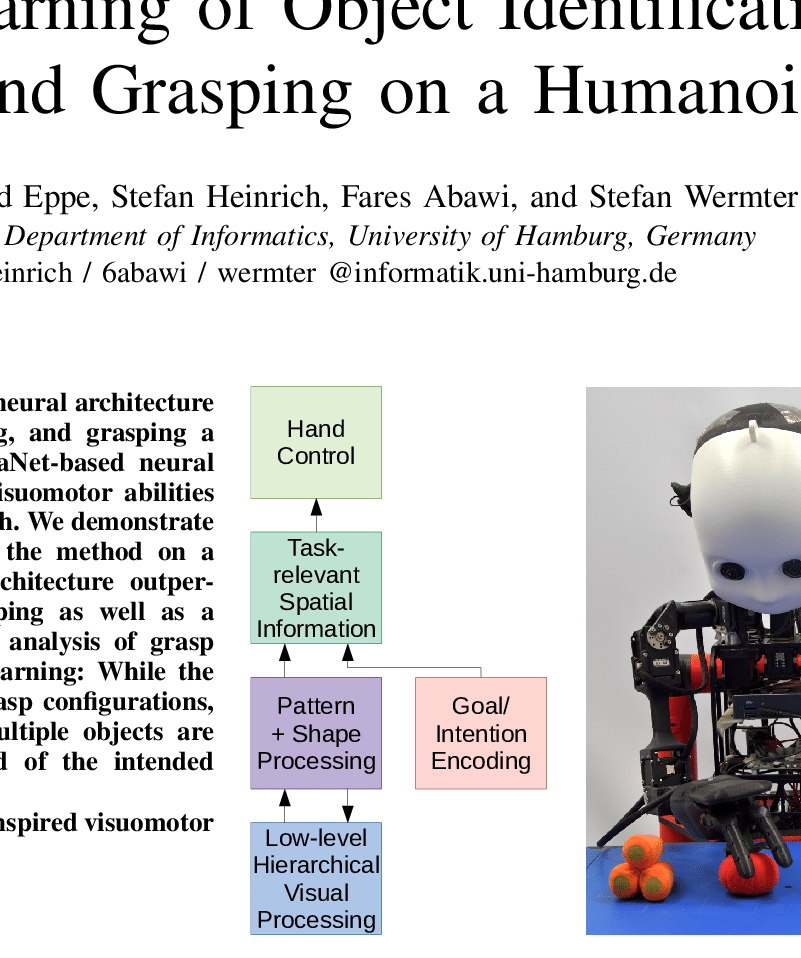
We present a unified visuomotor neural architecture
for the robotic task of identifying, localizing, and grasping a
goal object in a cluttered scene. The RetinaNet-based neural
architecture enables end-to-end training of visuomotor abilities
in a biological-inspired developmental approach. We demonstrate
a successful development and evaluation of the method on a
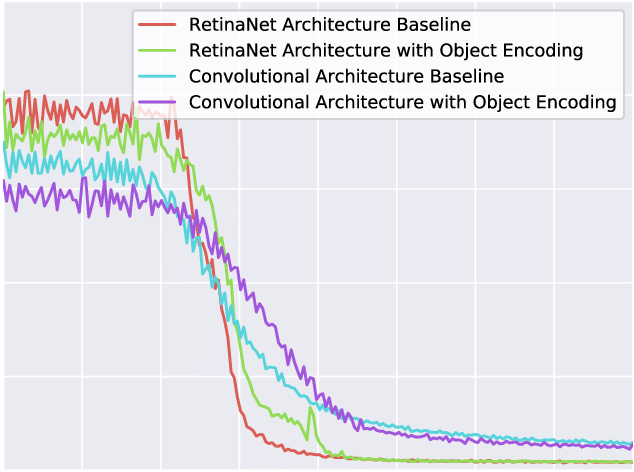
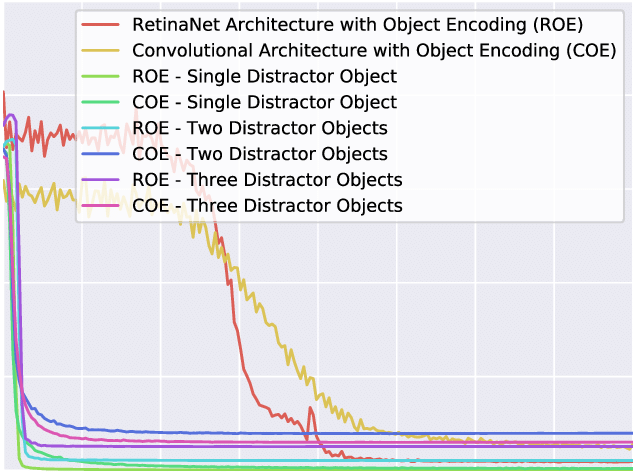
humanoid robot platform. The proposed architecture outperforms previous work on single object grasping as well as a
modular architecture for object picking. An analysis of grasp
errors suggests similarities to infant grasp learning: While the
end-to-end architecture successfully learns grasp configurations,
sometimes object confusions occur: when multiple objects are
presented, salient objects are picked instead of the intended
object.


@InProceedings{KEHAW19,
author = {Kerzel, Matthias and Eppe, Manfred and Heinrich, Stefan and Abawi, Fares and Wermter, Stefan},
title = {Neurocognitive Shared Visuomotor Network for End-to-end Learning of Object Identification, Localization and Grasping on a Humanoid},
booktitle = {2019 Joint IEEE International Conference on Development and Learning and Epigenetic Robotics (ICDL-EpiRob)},
journal = {None},
editors = {}
number = {}
volume = {}
pages = {19--24},
year = {2019},
month = {Aug},
publisher = {IEEE},
doi = {10.1109/DEVLRN.2019.8850679},
url = {None},
}